复合型搬运机器人

|
复合型搬运机器人如何保证工件安全? |
设备问题
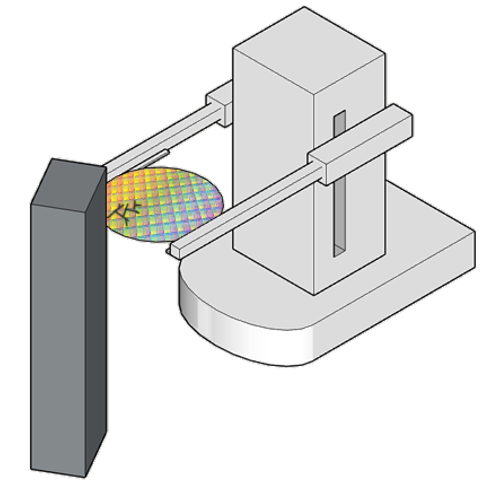
将具有“手”功能的机械手与具有“脚”功能的AGV结合,“手脚俱全”的复合机器人成为了市场的新趋势,将物料搬送、抓取组装等工序浓缩结合在了一个机构内。此类复合机器人如何避开障碍物和工作人员,防止工作物被损坏?

|
αSTEP AZ系列 | 
|
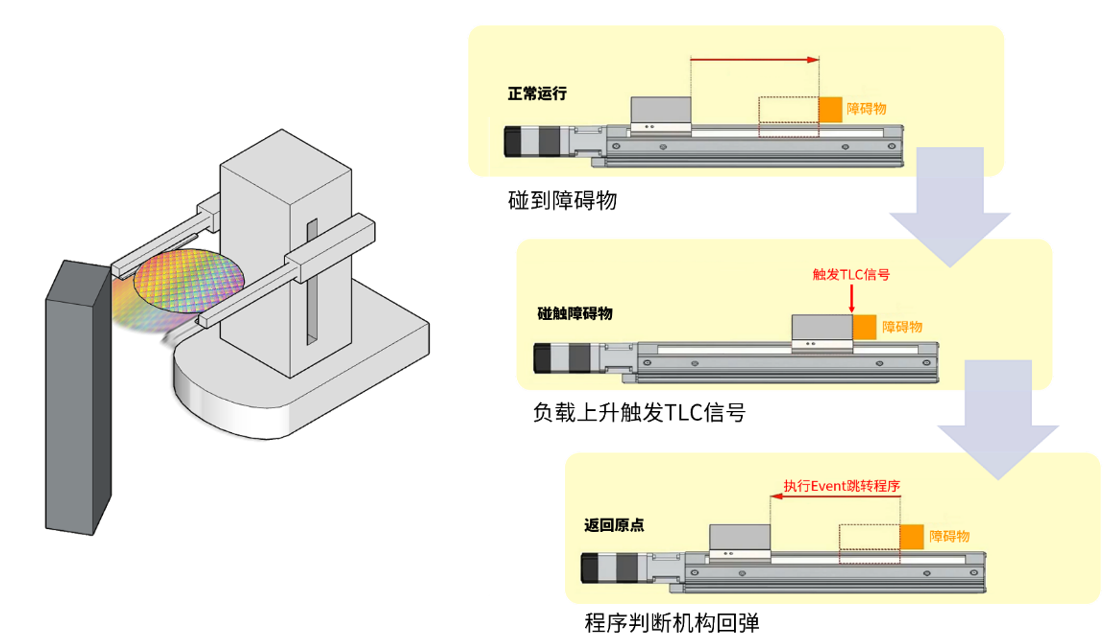
如上图以EAS系列滑台作为示例,一旦复合机器人的机械手在伸出碰撞到障碍物时,触发TLC信号后执行EVENT JUMP跳转程序立即回弹,对机械手中夹取的工件也能起到保护作用。
将此类紧急判断的程序直接交给驱动器通过信号实现动作切换,无需上位指令也可使得安全性得到保障。
EVENT跳转功能介绍
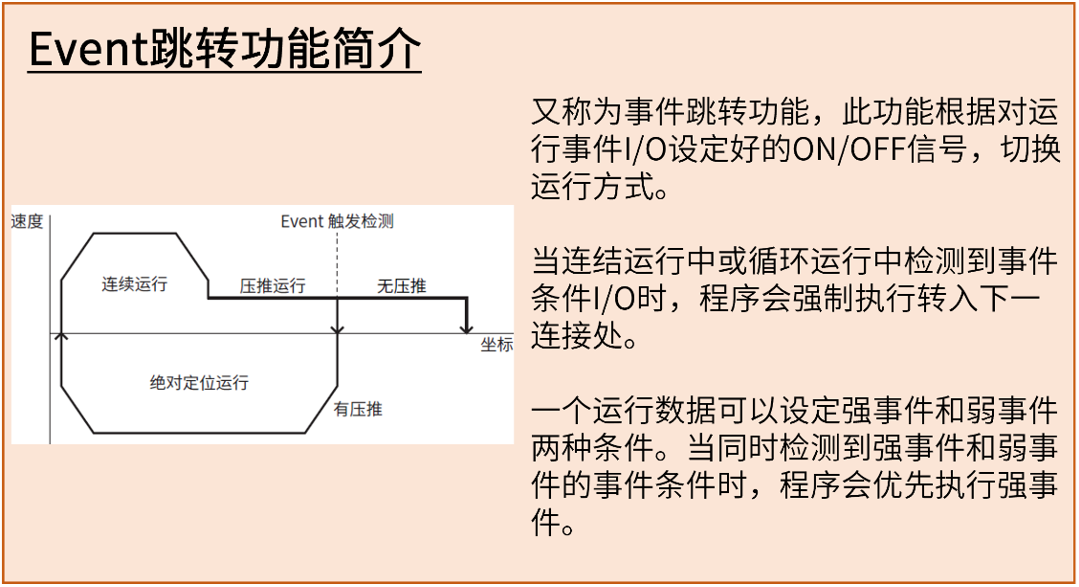
Event跳转功能的应用
●无压推时:NO.0运行至结束。(无Event发生,即机构没有碰到障碍物正常运行) ●有压推时:检测到TLC输出的ON边缘后,开始NO.1的运行。(Event发生,即机构碰触到障碍物后返回原点) 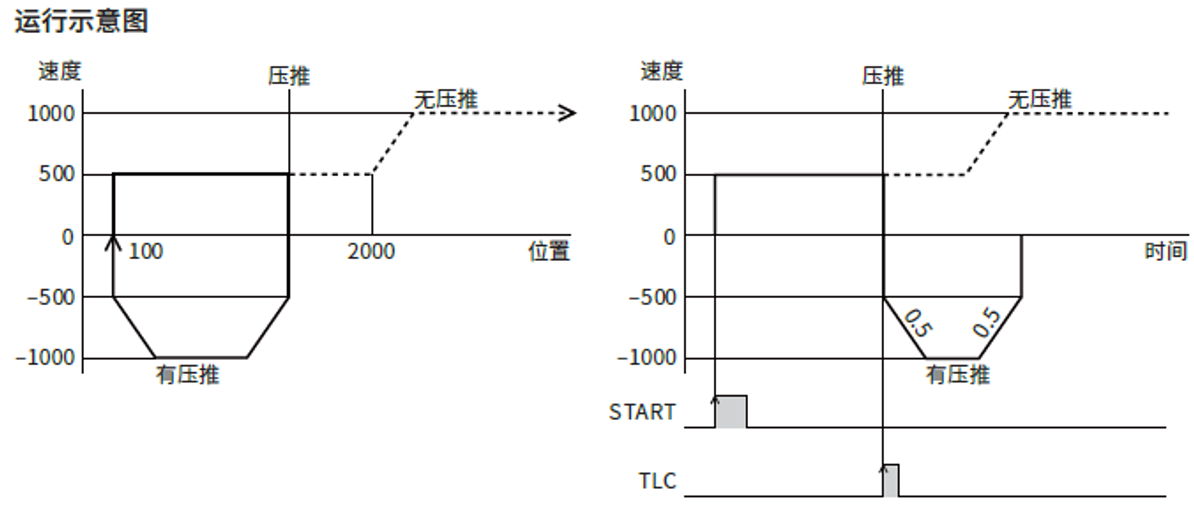
实际程序使用示例
运行数据的设定例 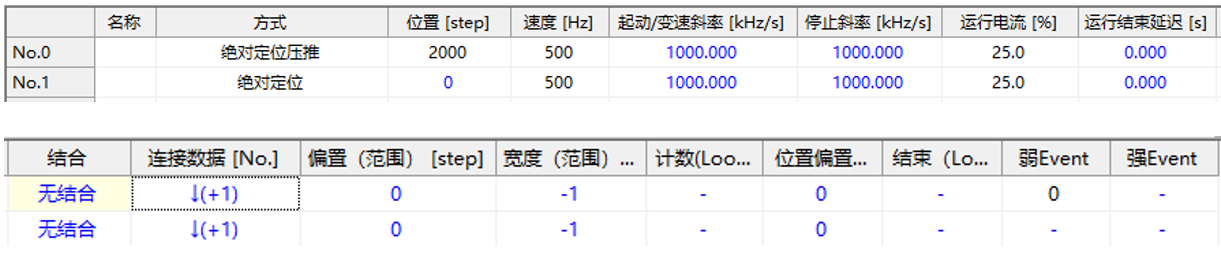 运行I/O Event设定例  相关产品
|