使用EH系列3爪型电动夹爪 夹取各种形状和材质的工作物
| ~ 尝试用EH系列3爪型夹取各种形状、材质的工作物的实验~ 实现如同人指般的精细“抓取”,帮助实现自动化节省人力。 稳妥抓取易受损的玻璃、易变形的树脂等。 |

|
|
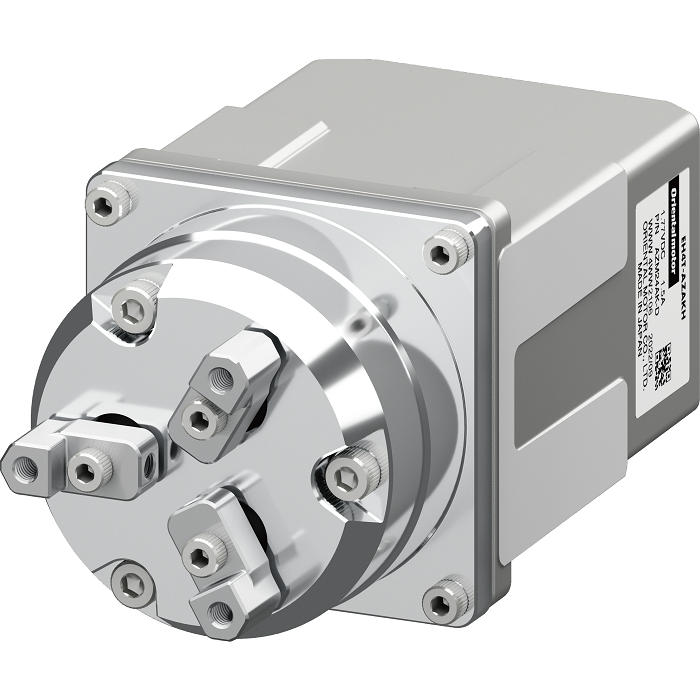
3爪型备有带安装护盖/无安装护盖产品。 此次使用的是带安装护盖的产品, 特性及性能不变。 用到的带安装护盖的产品大小从夹爪侧看, 纵横46mm×48.5mm、深98mm。 产品重量380g。最大把抓力为27N。 手指的最高速度为1200r/min、 压推运行的速度上限为12r/min。 右图左侧为此次实验使用的3爪型。
|
系统构成

|
|
实验使用以下内容 电动机(3爪电动夹爪)、驱动器(内藏定位型)、 样机上使用的I/O box和DC24V电源(金属盒内)。 使用产品 EH4T-AZAKH, AZD-KD
|

|
|

|
EH系列3爪型电动夹爪开闭动作
夹爪开闭的状况请观看以下视频。在直径3mm的夹具上套上了黑色胶套。
主要设定:分辨率为初始设定、运行速度为1kHz、往返的移动量为0~2200[step]
进行绝对定位压推运行。
出于实验目的,将运行电流下降到10%左右。(一般最多可下降到20%左右)
不易损伤工作物的抓持实验
| 尝试抓取了容易联想到把持力大小的灯泡、铅笔、毛线球、弹性材料。 从外侧抓持这些工作物。 根据规格来讲,夹具的直径为6mm时,张开幅度为Φ24、 因此可抓持大约在Φ20以下的工作物。
|
|

|
实验结果:
准备了各种类型的工作物:玻璃材料、六角形、2种较硬的与柔软的易变形物。
均可以完成抓持。
但弹性材料可能因设定的运行电流大小,产生些许形变。实际运行前请充分确认。
准备了各种类型的工作物:玻璃材料、六角形、2种较硬的与柔软的易变形物。
均可以完成抓持。
但弹性材料可能因设定的运行电流大小,产生些许形变。实际运行前请充分确认。
利用工作物内径的抓持实验
| 其次尝试抓持工作物的内径。工作物选择了, 黑色橡胶材质的环形(Φ20)和三角烧杯(内径17mm、重量42g)。
|
|

|
实验结果:
均可以完成抓持。
均可以完成抓持。
| 实验结论: 就像上述这样,3爪型有着可以将球体、圆柱、圆筒、六角形等工作物以3点支撑稳妥进行抓取的优势。 可作为机器人末端执行器的备选项。 ※本实验涉及的数据及结果仅为样机测试值,并非产品规格值。 |