








小型多关节机械臂OVR系列
3轴水平多关节机械臂(SCARA机器人)
|
|

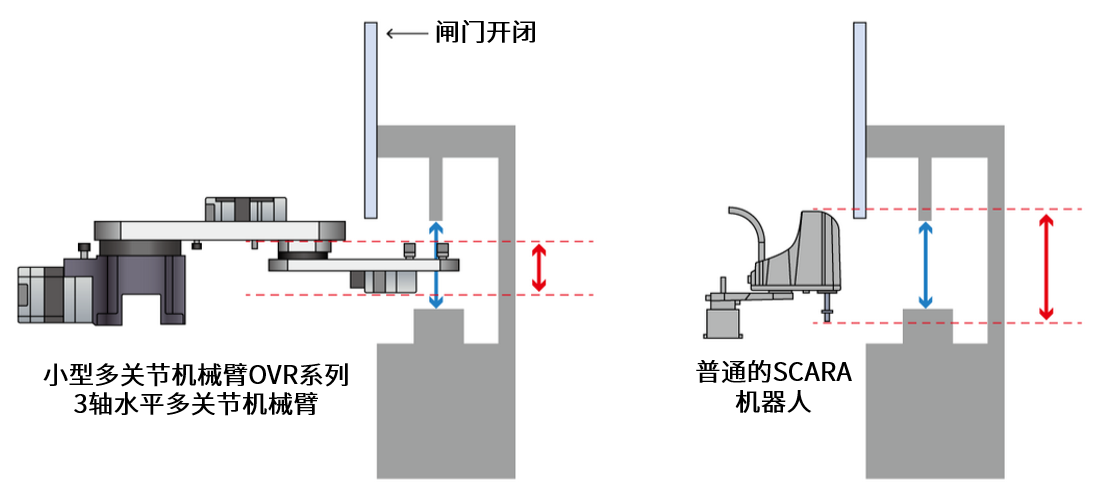
薄型的水平多关节机器人
比一般的SCARA机器人更薄,因此可用于零件的装卸用途等,可进入狭窄空间。
根据客户的装置自由设计
|
|
是可根据用途自由设计的机器人
|
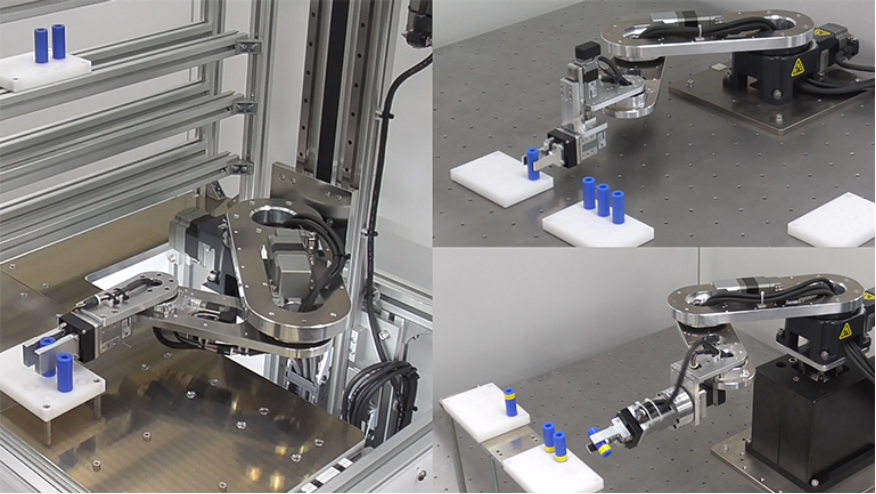
水平多关节机器人搬送案例及周边配件介绍视频
▶返回顶部
机器人控制器轻松控制
|
|
MRC01是可以控制搭载AZ系列机器人的机器人控制器。 |

|
|
备有MRC01和驱动器一体化的机器人控制单元MRCU系列。 有助于降低机器人导入难度,缩短研发时间。 |

注:使用时请考虑工业用机器人的安全性。(无法作为协作机器人使用)
采用搭载免电池绝对式编码器的AZ系列
|
|
全轴采用αSTEP AZ系列(DC电源输入)。由于为绝对式方式,无需外部传感器,因而节省配线。无需管理电池,可减少维护。
由于为DC电源输入型,因此,易于电源线绕线,也可灵活应对生产线的设置及布局变更。
|

▶返回顶部
导入机器人前的实用工具
|
MRC Studio Simulator |
在探讨机器人导入的阶段,即使没有机器人本体及MRC01,也可以在电脑上对预想的动作进行模拟的软件(免费)。
|


▶返回顶部
*1:定位端子插入原点端子孔的设置原点姿势状态下的可动范围。
*2:为可搬质量1kg时的最大速度。3kg时为300mm/s。
*3:基于各轴减速机的规格值。
※建议电源容量DC24V 170W
▶3轴水平多关节机械臂OVR3041K3-H产品详情请点此查看
规格
| 品名 | OVR3041K3-H (点此查看详情) |
|
|---|---|---|
| 轴数 | 3轴 | |
| 输入电压 | DC24V | |
| 机械臂长度 | 第1臂 | 230mm |
| 第2臂 | 180mm | |
| 可搬质量 | 3kg | |
| 可动范围*1 | 第1轴 | ±170deg |
| 第2轴 | ±140deg | |
| 最大速度 | 第1轴 | 300deg/s |
| 第2轴 | 300deg/s | |
| 第3轴 | 720deg/s | |
| 合成(TCP)*2 | 1000mm/s | |
| 反复定位精度*3 | ±0.03mm | |
| 容许转动惯量 | 0.026kgm2 | |
| 本体质量 | 7.6kg | |
| 安装形式 | 架台安装/倒挂安装 | |
*2:为可搬质量1kg时的最大速度。3kg时为300mm/s。
*3:基于各轴减速机的规格值。
※建议电源容量DC24V 170W
▶3轴水平多关节机械臂OVR3041K3-H产品详情请点此查看
▶返回顶部
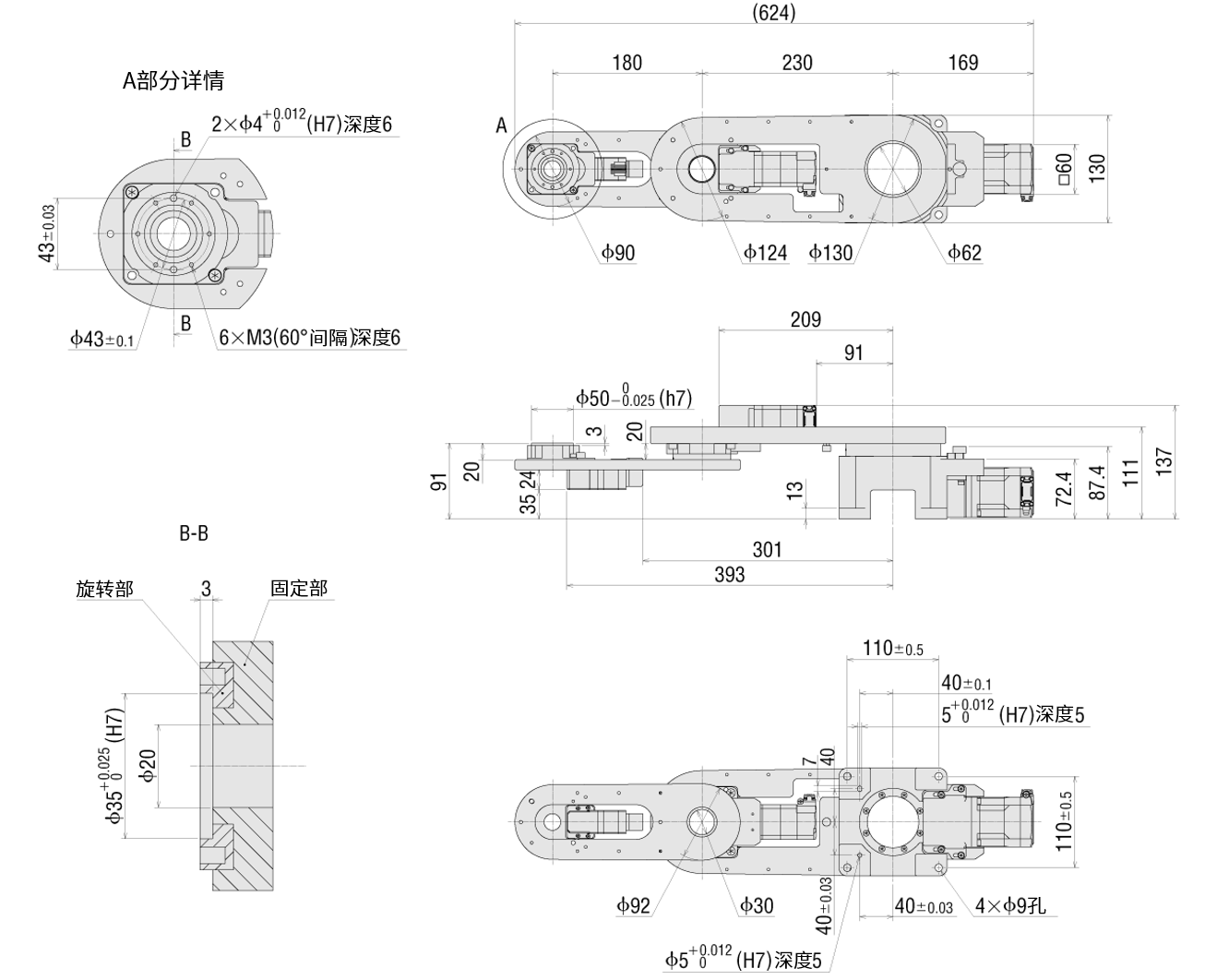
外形图·工作范围图
外形图(单位 mm)
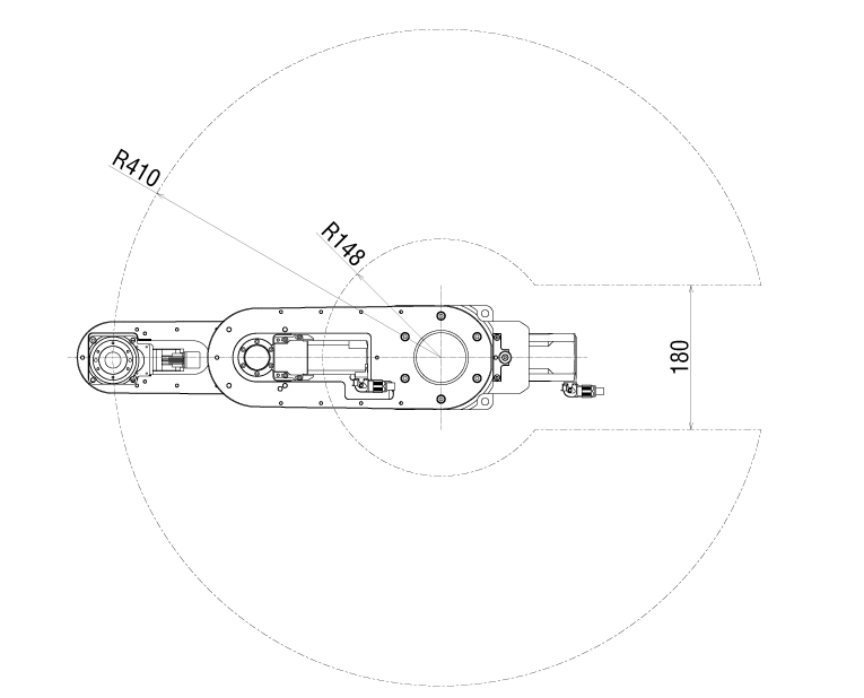
工作范围图(单位 mm)
*虽然最大工作范围为410mm,但考虑到使用控制器时的特殊点,建议在400mm以内使用
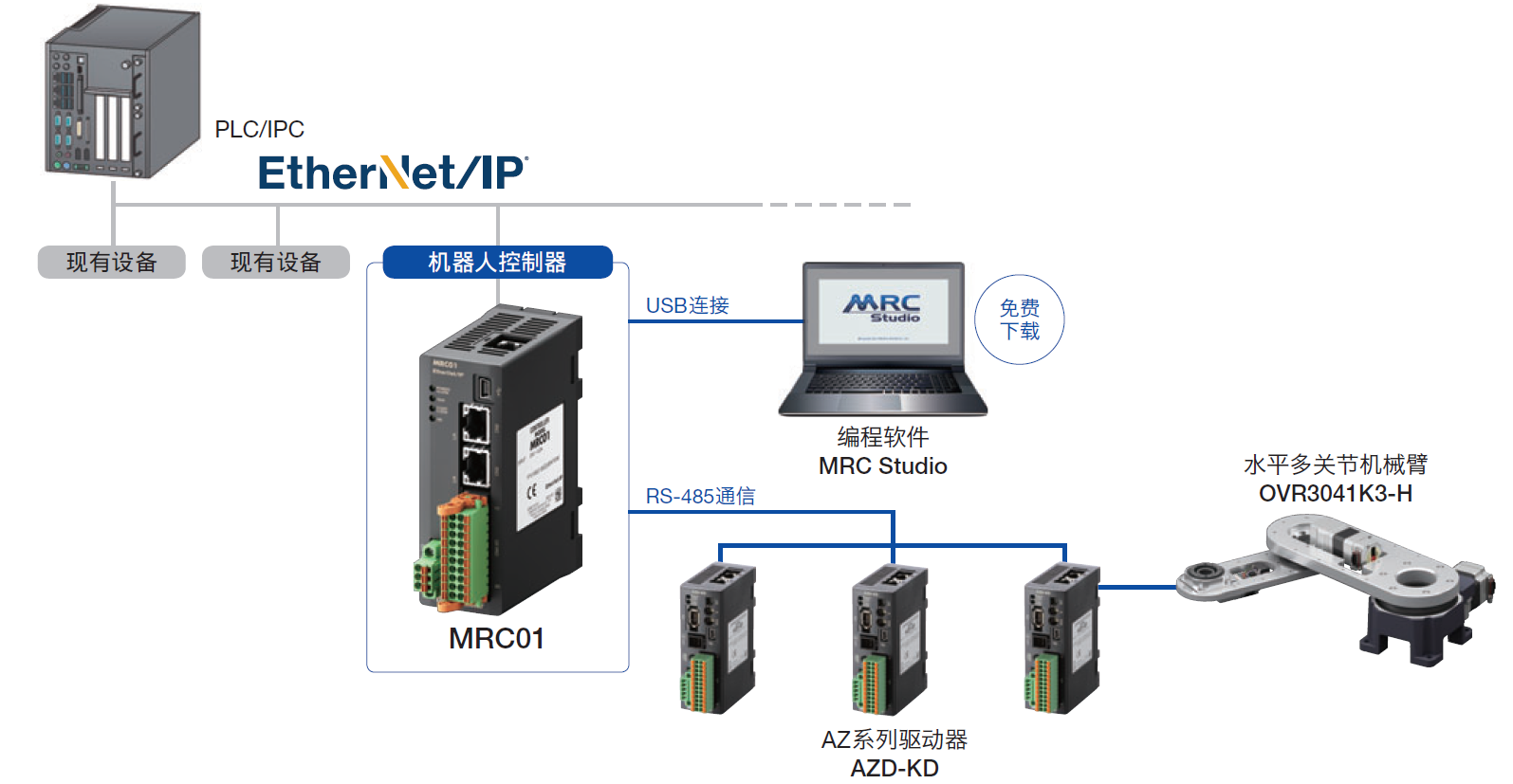
系统构成
机器人、机器人控制器、驱动器、电缆线需要另行购买。
通过使用机器人控制器MRC01与编程软件MRC Studio可轻松控制机器人。
建议连接MRC01的驱动器为DC电源输入的驱动器AZD-KD或、mini驱动器AZD-KR2D。
通过使用机器人控制器MRC01与编程软件MRC Studio可轻松控制机器人。
建议连接MRC01的驱动器为DC电源输入的驱动器AZD-KD或、mini驱动器AZD-KR2D。
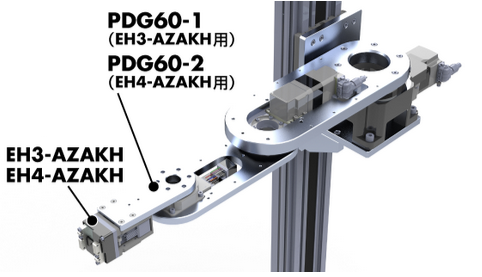
末端执行器
| 系列 | 2爪型 EH3-AZAKH |
2爪型 EH4-AZAKH |
3爪型 EH4T-AZAKH |
| 最大抓持力(N) | 7 | 25 | 50 |
| 容许负载(N) | 2 | 5 | 15 |
| 最大行程(mm) | 15 | 25 | φ24 |
| 反复定位精度(mm) | ±0.02 | ±0.02 | - |
| 质量(kg) | 0.2 | 0.38 | 0.38 |
| 适合抓握的工作物形状 | 矩形 |
圆柱体、复杂形状、球体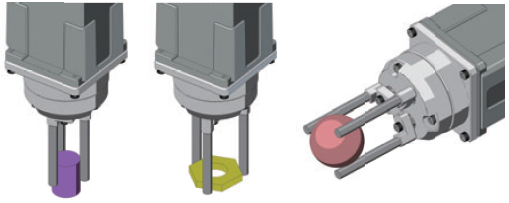 |
|
| 可动范围 |  |
 |
|
| 产品视频 | ▶点此查看: 变速抓取样机演示 |
▶点此查看:三爪样机演示 |
|





注意:
*本资料仅供参考。选购前请仔细确认设备需求和产品规格。
*如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
*启动机器人前客户应负责事先对机器人实施充分的安全确认。对于机器人系统整体的安全性,本公司不承担任何责任。
*需要客户按照实际使用条件进行编程,本公司无法提供编程服务。
*本资料仅供参考。选购前请仔细确认设备需求和产品规格。
*如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
*启动机器人前客户应负责事先对机器人实施充分的安全确认。对于机器人系统整体的安全性,本公司不承担任何责任。
*需要客户按照实际使用条件进行编程,本公司无法提供编程服务。