








搬送机器人的解决方案

随着对“工作物搬送作业”的自动化及省人力需求的不断提升,机器人搬送(AGV/AMR/GTP※)正作为解决方案被导入。
无刷电动机BLV/BLH系列可实现电池驱动,因此可用于搬送机器人的车轴或搭载于搬送装置。
有助于应对各类的现场所需求的多种多样的行车模式及搬送物。
※AGV:Automatic Guided Vehicle.AMR:Autonomous Mobile Robot.GTP:Goods To Person
无刷电动机BLV/BLH系列可实现电池驱动,因此可用于搬送机器人的车轴或搭载于搬送装置。
有助于应对各类的现场所需求的多种多样的行车模式及搬送物。
※AGV:Automatic Guided Vehicle.AMR:Autonomous Mobile Robot.GTP:Goods To Person
低底盘·细长设计 :适应各种货物形状及场所的机身

停止位置的设定・微调整 : 与前后工程顺畅协作
希望进入货架、搬运架底部,进行自动搬送:低底盘设计
低底盘型的搬送机器人可进入产品·部件货架、搬运架底部,将其升起(或卡住),有效实现搬送作业的自动化。电动机安装可选择朝天安装或侧面安装,使得设计自由度增加,从而有助于低底盘设计。
朝天安装 法兰输出头
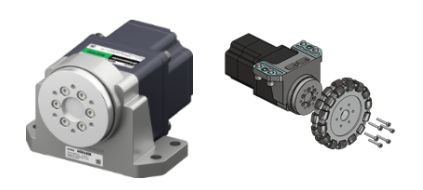 |
侧面安装 中空轴扁平减速机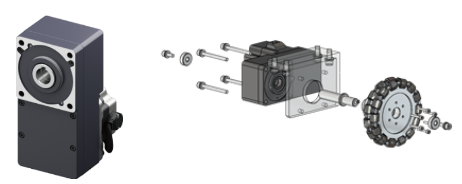
|
窄路也希望能同时行驶:细长化
通过使用中空轴扁平减速机,并交错安装,实现减少车身宽度的细长设计。因此窄路也能同时行驶。从而减少了搬送机器人的等待时间、有助于提高效率。
更低底盘·细长化
●小型・薄型驱动器
因为是小型尺寸,电池、控制机器的设置自由度更大。

●电气制动※
停止时可通过电气制动保持停止位置,因此无需机械制动(电磁制动)。
因为电动机全长短,可实现缩减车身的设计。
※仅通电时有效。
●小型・薄型驱动器
因为是小型尺寸,电池、控制机器的设置自由度更大。
●电气制动※
停止时可通过电气制动保持停止位置,因此无需机械制动(电磁制动)。
因为电动机全长短,可实现缩减车身的设计。
※仅通电时有效。
高负载性能:应对工作物的大型化、搭载机器人或传送带
搬送机器人负载性能受到容许径向负载的影响。安装法兰输出头时为1500N(153kgf),中空轴扁平减速机为最大2040N(208kgf)的高强度。由此有助于满足工作物的大型化、搭载机器人及传送带等需求。
搬送机器人负载性能受到容许径向负载的影响。安装法兰输出头时为1500N(153kgf),中空轴扁平减速机为最大2040N(208kgf)的高强度。由此有助于满足工作物的大型化、搭载机器人及传送带等需求。
容许径向负载[N]
※1:电动机轴转速为~300r/min的值 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
希望从指定位置设定剩余移动距离:位置控制
可像步进电动机及伺服电动机一样设定移动量。可实现预先在导轨上设定的距离的搬送。在自行行驶中,
也可设定从传感器位置移动到目标位置的距离,完成区间内的定位运行。
希望微调停止位置:速度控制
电动机轴的转速可自1r/min进行设定。换算成搬送速度,车轮直径为100mm时,约为0.3m/min。因为速度非常低,过冲少,可以进行停止位置的微调整。
并且,最高转速为4000r/min,有助于提升搬送速度搬送速度从而减少所需时间。

固定车辆确保移载作业稳定进行
因搭载机械制动(电磁制动)及电气制动,停止时可固定车俩。
即便是移载时或倾斜时也能抑制车辆偏移,有助于确保稳定作业。

因搭载机械制动(电磁制动)及电气制动,停止时可固定车俩。
即便是移载时或倾斜时也能抑制车辆偏移,有助于确保稳定作业。
搬送机器人需要具备能应对路况变化、避让突发障碍的的行车性能。因为可接收电动机的反馈信号,并针对反馈信号顺畅地向各轴发布相应指令,故可灵活进行笔直前进・避让・停止的调整。
●搭载高分辨率传感器
传感器的控制分辨率为最大36,000P/R。可详细掌握行驶状态及当前位置。
●直接数据运行
运行中的急刹车、速度恢复等可根据传感器的信息进行灵活运行。
●ID共享模式・集中发送数据功能
可向多个车轴同时发送指令,因此能够避免蛇行或进行急转弯等动作。
対応製品
●搭载高分辨率传感器
传感器的控制分辨率为最大36,000P/R。可详细掌握行驶状态及当前位置。
●直接数据运行
运行中的急刹车、速度恢复等可根据传感器的信息进行灵活运行。
●ID共享模式・集中发送数据功能
可向多个车轴同时发送指令,因此能够避免蛇行或进行急转弯等动作。
调整时的实用功能
●通过网络进行各种设定
BLV系列 R型: 、
、
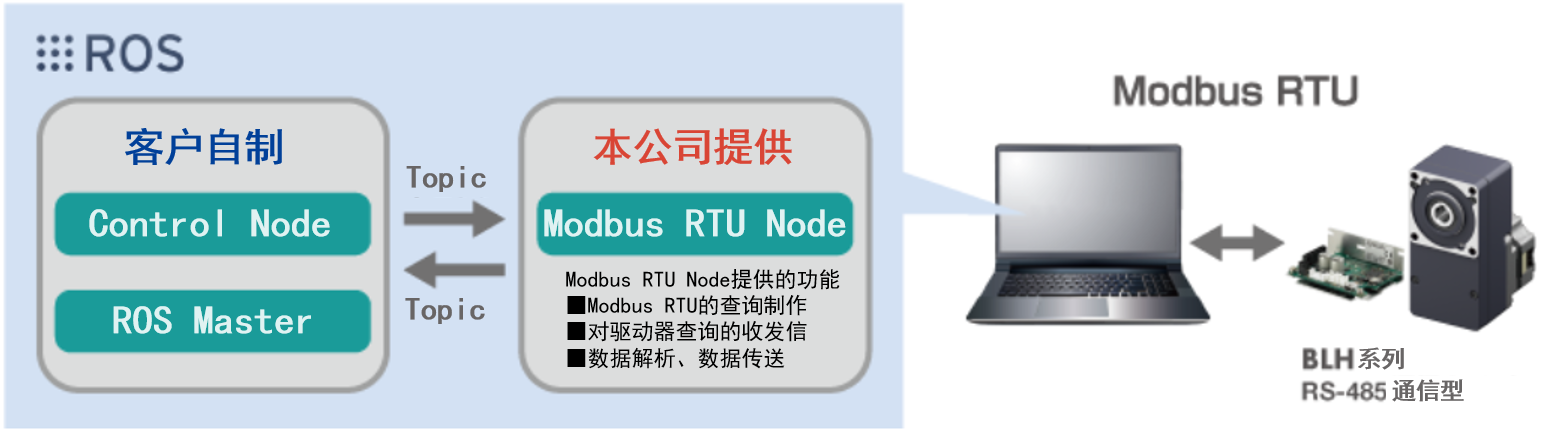
BLH系列:
BLH系列可由「ROS」制作的软件进行控制。
●针对负载进行相应增益调整
可针对负载进行相应的增益(应答性)调整。有助于稳定行驶。
●状态监控
可通过支援软件的监控功能,对状态进行把握。BLV系列R型搭载跟踪监控,可连续进行最多1日的计测。
因此出现问题时有助于判明原因。
●通过网络进行各种设定
BLV系列 R型:
、BLH系列:
BLH系列可由「ROS」制作的软件进行控制。
●针对负载进行相应增益调整
可针对负载进行相应的增益(应答性)调整。有助于稳定行驶。
●状态监控
可通过支援软件的监控功能,对状态进行把握。BLV系列R型搭载跟踪监控,可连续进行最多1日的计测。
因此出现问题时有助于判明原因。
対応製品
●BLV系列 R型(▶点此查看详细介绍)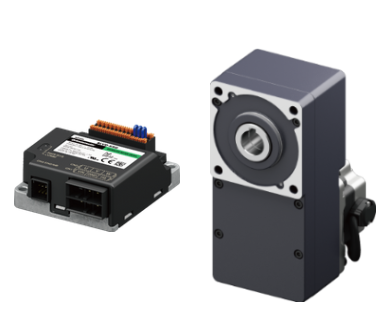 |
●BLH系列 模拟信号设定型 ●BLH系列 数字设定型/RS-485通信型  |
| 特征 | 输出功率 | ||||||
| 15W | 30W | 50W | 100W | 200W | |||
| 矮型・细长设计 高承重性能 |
输出轴 | 中空轴扁平减速机 | ●● | ●● | ●● | ● | |
| 法兰输出头 | ●● | ||||||
| 小型・薄型驱动器 | ●● | ●● | ●● | ●● | ● | ||
| 电磁制动 | ●● | ●● | ●● | ● | |||
| 电气制动 | 负载保持 | ● | ● | ● | |||
| S-ON | ● | ● | |||||
| 停止位置的 设定·微调 |
位置控制 | ● | ● | ||||
| 速度控制 | 1~4000r/min | ● | ● | ||||
| 80~3000 r/min |
● | ● | ● | ||||
| 100~3000 r/min |
● | ● | ● | ● | |||
| 直行 回避 停止 |
高分辨率传感器 | ● | ● | ||||
| 直接数据运行 | ● | ● | |||||
| 数据发送 | ID共享模式 | ● | ● | ||||
| 统一发信 | ●※ | ●※ | ●※ | ||||
| 对应网络 | Modbus (RTU) |
●※ | ●※ | ●※ | ● | ● | |
| CANopen | ● | ● | |||||
| 增益调整 | ● | ● | |||||
| 支援软件 | ● | ● | ● | ● | ● | ||
※:仅RS-485通信型
