








半导体制程相关设备

|
活用循环功能,坐标管理&定位十分轻松 |
提高效率、简易控制
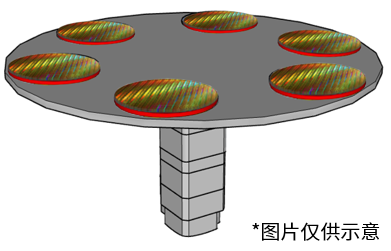 |
晶圆旋转主轴工位:连续单方向、固定位置的晶圆旋转
设备:半导体制程相关设备工位:晶圆旋转主轴工位 解决方案:步进伺服混合控制系统αSTEPAZ系列 ●绝对式系统 ●简易循环功能 痛点:①晶圆载具连续旋转,绝对坐标不断累积, 最终导致坐标溢出,控制中断,维护麻烦。 ②原点返回控制繁难,十分耗时。 |

|
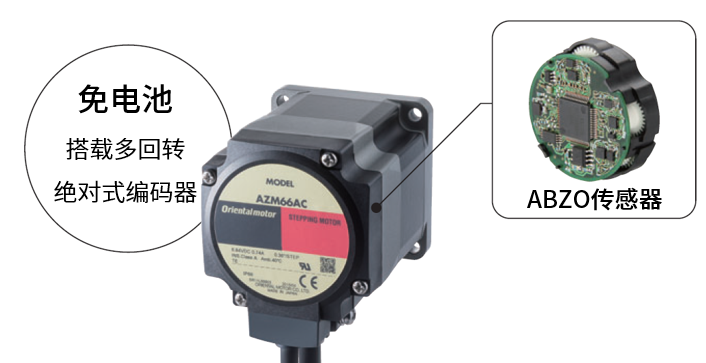
步进伺服混合控制系统αSTEP AZ系列 |

|
循环坐标功能设定,坐标管理更简易
■机械式绝对编码器·实现绝对坐标位置管理绝对式系统位置管理,无需电池、传感器等配件。支持高速原点返回、重新上电后的绝对坐标记忆、软极限设置、内藏定位程序运行等。 有助于提升生产效率、节省安装空间、降低成本。
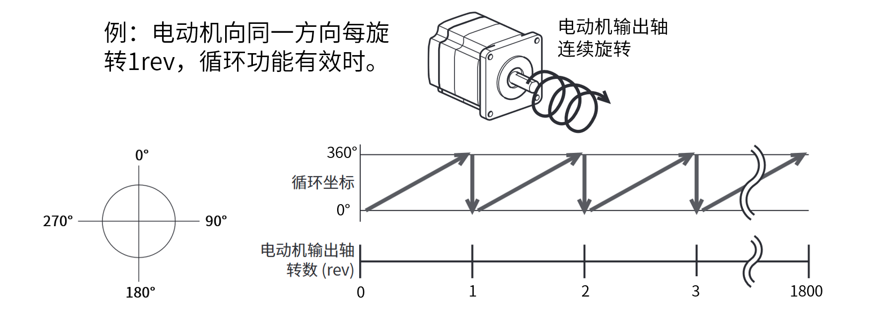
循环功能是在电动机输出轴的转数超出设定的范围时,自动预置当前位置的位置信息的功能。
应用例:
连续旋转的镀膜旋转盘工位,电动机输出轴每旋转1rev,循环坐标时,坐标将自动清零。
连续旋转的镀膜旋转盘工位,电动机输出轴每旋转1rev,循环坐标时,坐标将自动清零。
有助于:
①便捷的确认机构/晶圆当前位置状态; ②避免坐标溢出时的坐标数据处理难题; ③高效的高速原点返回。 |
|

动作程序设定于驱动器中,大大减轻上位负担
■内藏定位功能,轻松完成固定位置的定位控制运行数据
设定存储数据运行所需的运行方式、目标位置、运行速度、加减速斜率、运行电流等。 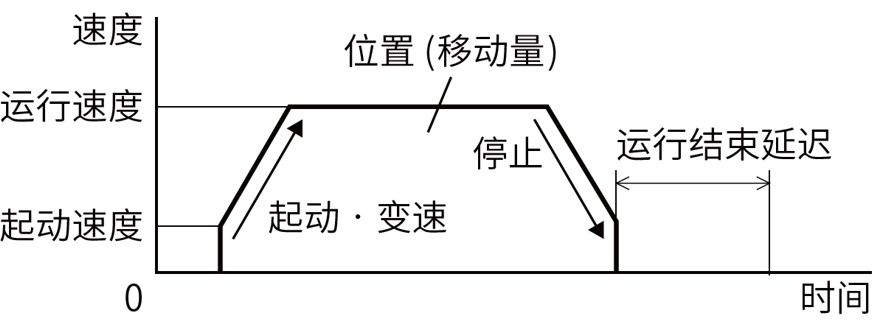 |
自动顺序连接
|


干货:
①自动顺序连接----上位仅需1个start输入信号,实现简单设定&控制
②Round循环功能----360°坐标循环不溢出,支持单圈高速回原点
①自动顺序连接----上位仅需1个start输入信号,实现简单设定&控制
②Round循环功能----360°坐标循环不溢出,支持单圈高速回原点
固定动作定位的方式,哪种控制更简便?
| 脉冲 | I/O、现场网络 | 运动网络 | |
| 控制类型 | Modbus、EtherNet/IP、PROFINET | EtherCAT、SSCNETⅢ/H、 MECHATROLINK-Ⅲ |
|
| 优点 | ●控制熟练 ●响应速度快 |
●控制简单(I/O的控制方式) ●对上位控制要求低 ●部分上位自带现场网络控制协议 ●上位+驱动器方案成本性价比高 |
●接线简单 ●响应速度快 ●适合动作要求高的设备 |
| 不足 | ●接线复杂 ●容易干扰 ●排故麻烦 |
●通讯速度相对慢 ●不支持快速响应动作 ●插补效果不佳 |
●专用通讯模块 ●系统成本高 ●需具备一定的编程设定能力 |
相关产品
| |
|