








设备如何“精”益求精你做对了吗?

|
步进电动机如何提升精度 |
| 以下做法能够提高步进电动机精度吗? |
| ▶选用更高精度的 丝杠 |
▶选用高分辨率型的 步进电动机 |
▶替换为伺服电动机 或带编码器的闭环电动机 |
▶细分步距角 |

|
选用更高精度的丝杠 |
|
|
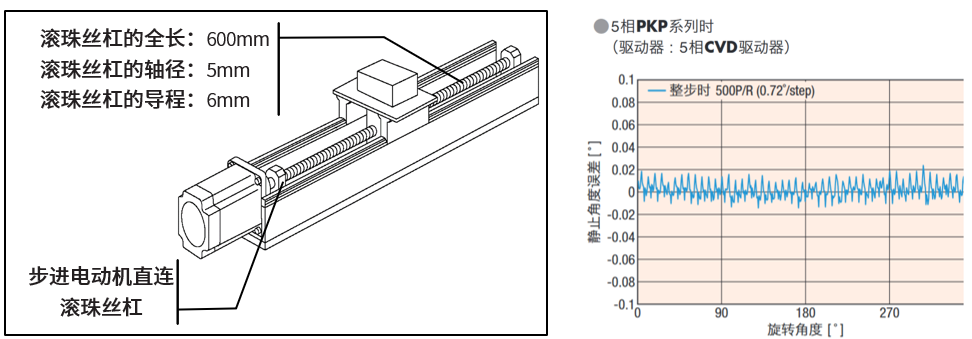
然而,实际情况是C0等级的丝杠与电动机组合可参考的反复定位精度约为±0.003mm(>0.0008mm)。
因此对于设备而言,机构的机械和组装精度是决定性因素,通过选用更高精度规格的机构产品可有效提高设备精度。
步进电动机的构造及定位原理
混合型步进电动机共同的特征是基于小齿和轴向磁化的永磁磁钢组合而成的超多极构造。高转矩、步距动作、高停止精度等性能全部基于此构造而得以实现。通过输入驱动器的脉冲信号转换励磁相实现步进动作。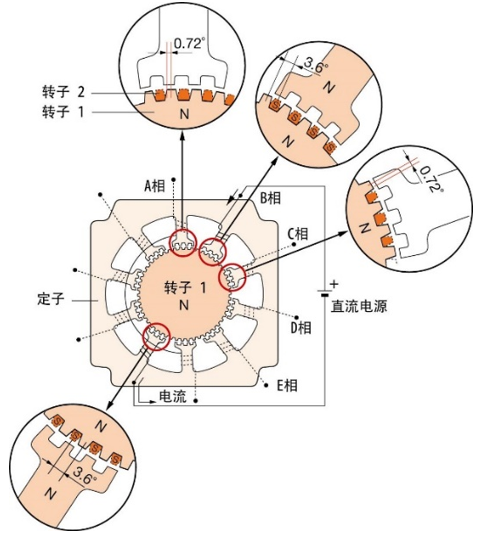
|
|
影响定位精度的要素
根据步进电动机的构造和定位原理,可以得出影响定位精度的要素。
①定子和转子的机械加工精度、组装精度
②驱动器电流的供给的精度
②驱动器电流的供给的精度
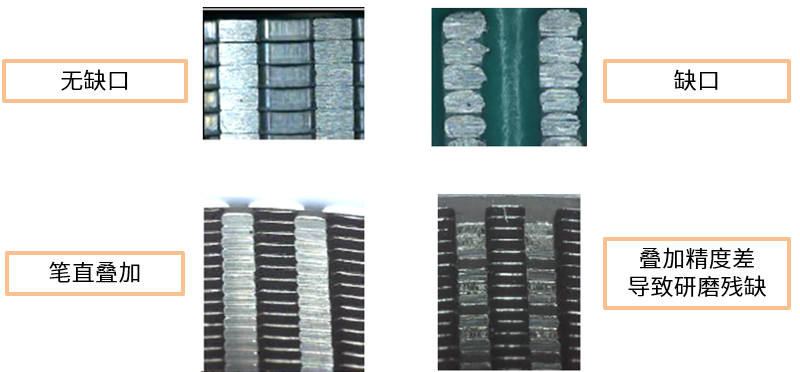
组装时的叠加精度影响角度精度造成定位精度的不同
|
|
选用高分辨率型的步进电动机 |
|
|
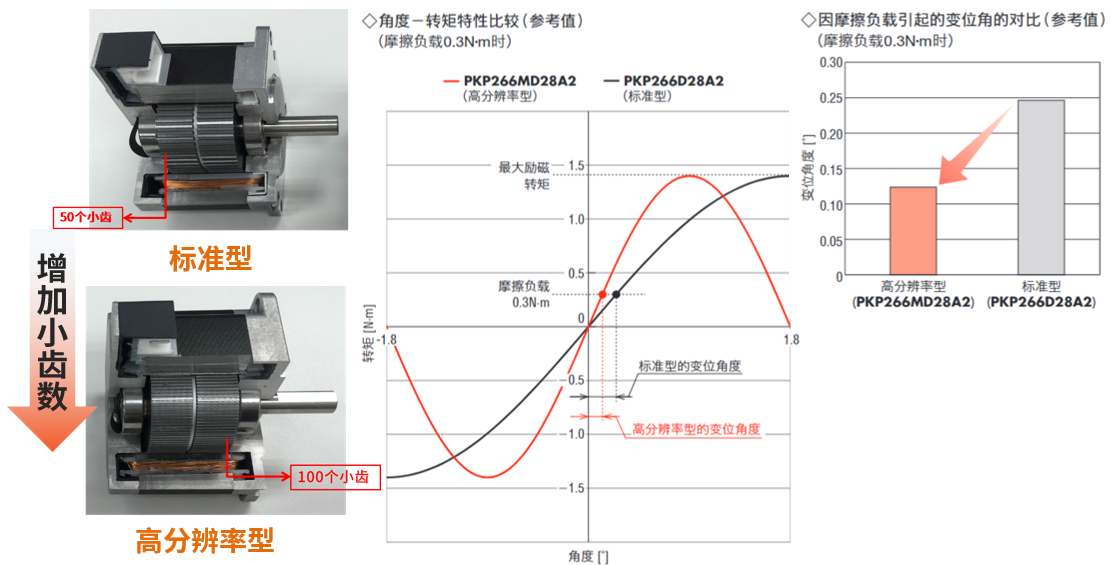
相对标准型,高分辨率型因摩擦负载引起的变位角更小。
|
|
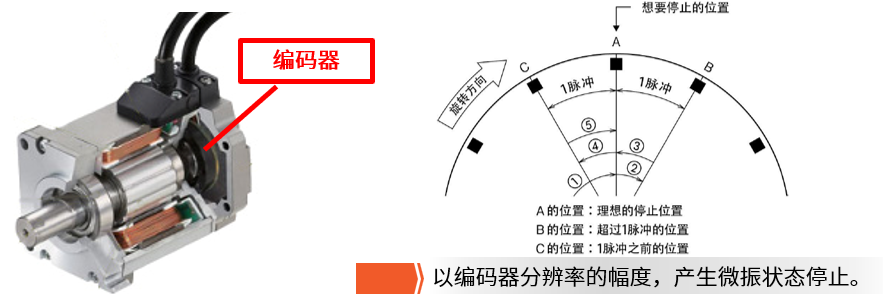
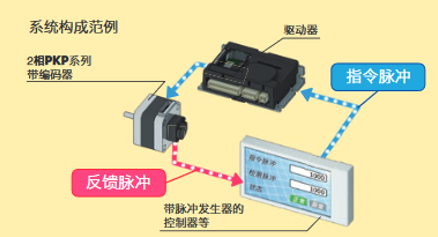
替换为伺服电动机或带编码器的闭环电动机 |
|
|
伺服电动机与步进电动机构造的不同决定了精度影响要素的不同。
伺服电动机在电动机的反输出轴侧搭载有编码器,通过检测转子的位置和速度,可执行高分辨率、高响应定位运行。伺服电动机依靠编码器的反馈指令对比进行定位,因此提升编码器的精度、编码器的组装精度等可提升定位精度。
|
|
细分步距角 |
|
|
细分步距角是提升步进电动机精度的一个常见误区。
旋转角度取决于步进电动机的构造,需要旋转基本步距角以外的角度时,可以采用从电气方面对步距角进行细分的微步驱动。微步驱动可以将电动机的旋转角度变得非常小,却无法提升停止精度。
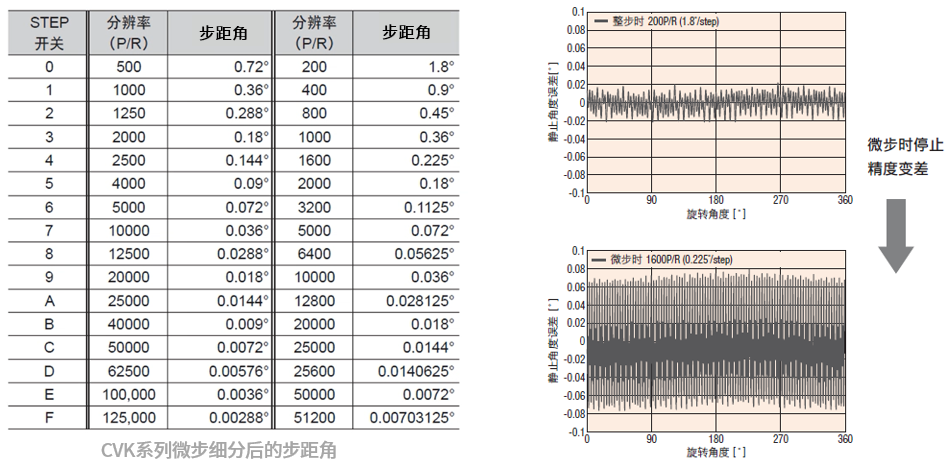
通过微步驱动,可将分辨率提高到最大125000P/R。微步驱动时与整步驱动时相比,普遍有停止精度变差的情况,2相尤为显著。
更多解决方案尽在东方马达研讨会。
>>>点此即可查看直播回放。(将随课程的更新陆续上线,敬请期待更多研讨会信息)
通过微步驱动,可将分辨率提高到最大125000P/R。微步驱动时与整步驱动时相比,普遍有停止精度变差的情况,2相尤为显著。
东方马达研讨会直播回放
希望在不改变安装尺寸条件下提升转矩、希望提升稳定性、希望节省能源、希望抑制振动、希望提升停止精度……更多解决方案尽在东方马达研讨会。
>>>点此即可查看直播回放。(将随课程的更新陆续上线,敬请期待更多研讨会信息)
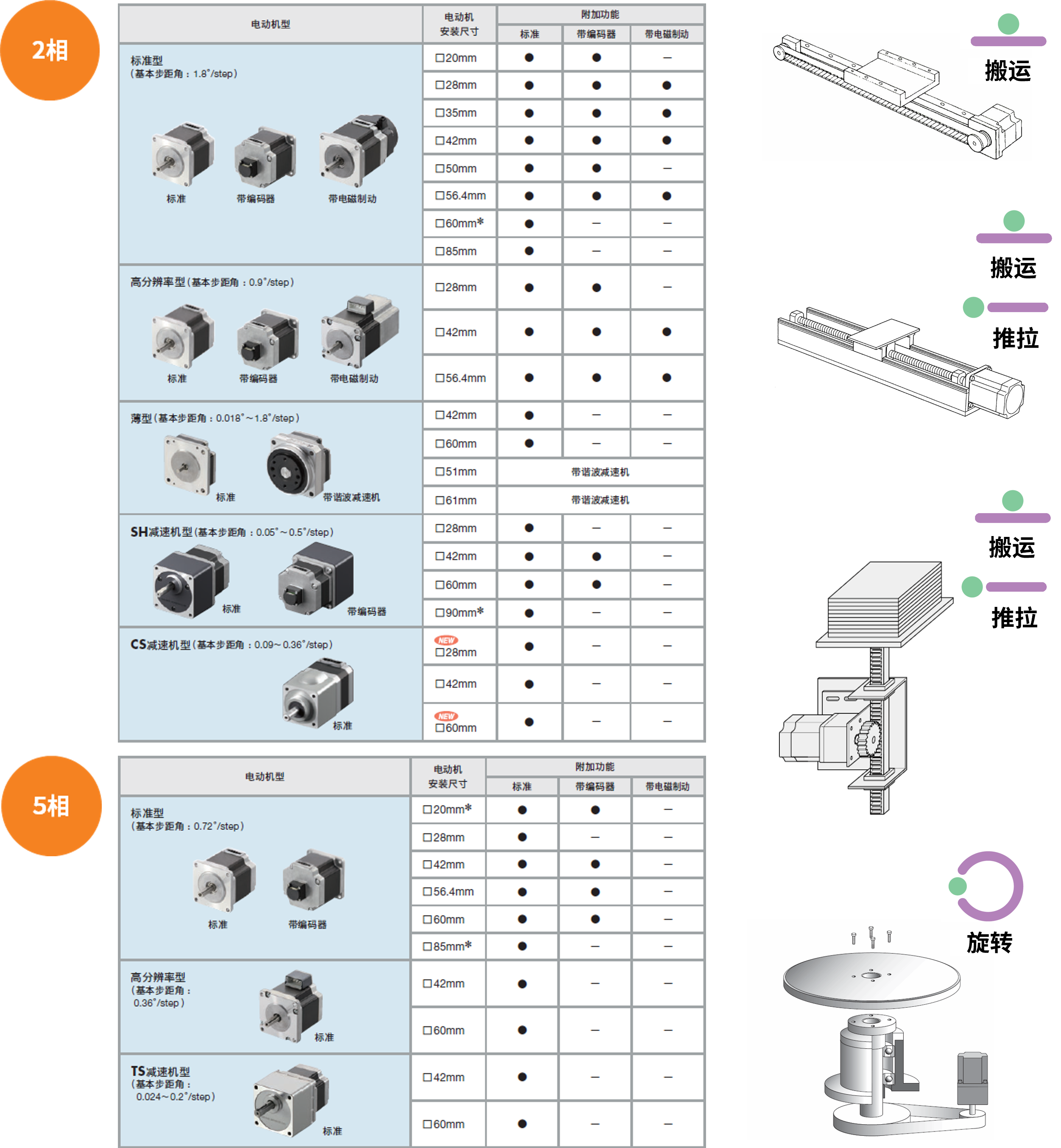
相关产品

| ▶选用更高精度的 丝杠 |
▶选用高分辨率型的 步进电动机 |
▶替换为伺服电动机 或带编码器的闭环电动机 |
▶细分步距角 |