机械手设备

|
步进电动机的同步性和高响应性的应用 |
同步性、高响应性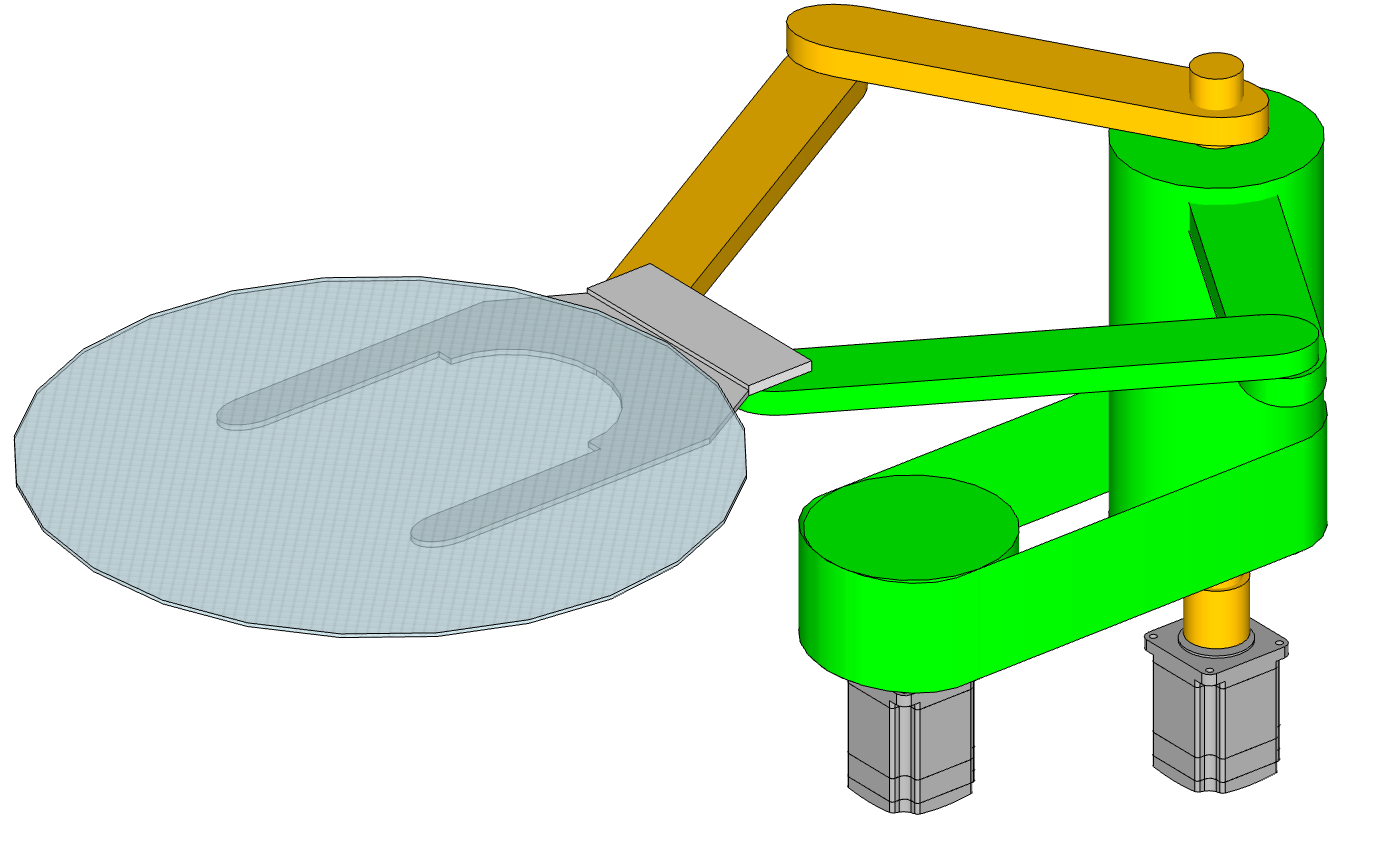 |
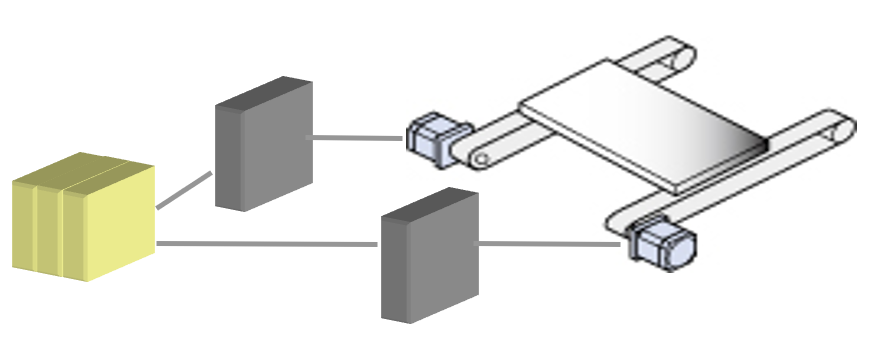
机械手设备:稳定地对物料进行取、放
设备:机械手机构:电动机直连/皮带机构 动作概况:通过两台电动机同时相反方向转动,分别带动机械手的两个手臂伸缩进行晶圆、玻璃的取、放料。 痛点:使用伺服电动机进行驱动机械手取、放料,停止过程会出现不同程度的晃动,导致物料的磨损。 |

|
步进电动机 |

|
步进电动机免增益调整的开环控制
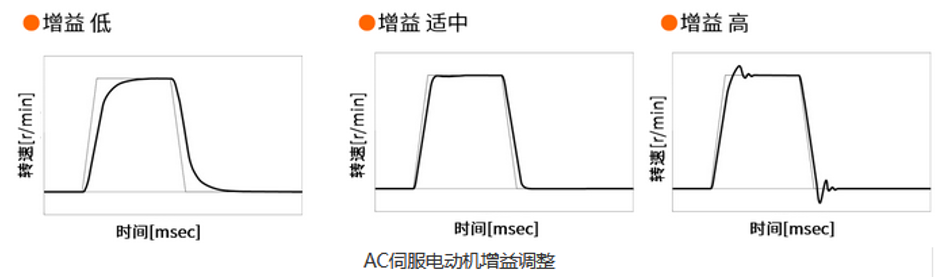
痛点分析:①由于存在低刚性(皮带)传动机构的设计,伺服电动机在停止时的增益调整易使得机构晃动,且整定不好调节。
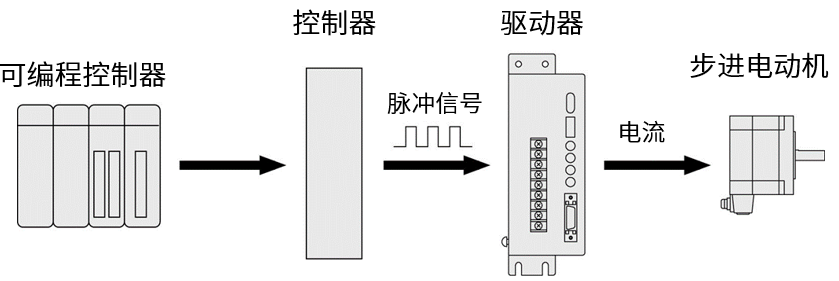
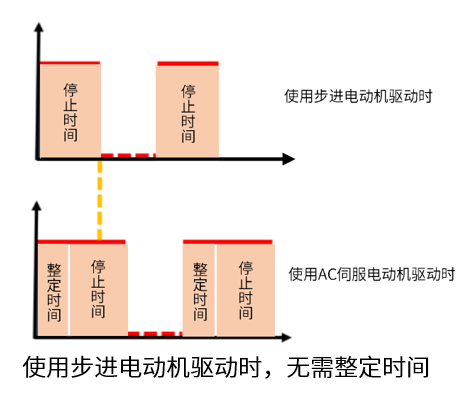
开环控制的步进电动机无需进行增益调整
电动机本体是被设计仅用控制器、驱动器、电动机构成开环控制方式就可以简单地进行“高精度定位运行”的同步电动机。
 |
|
▶点此查看步进电动机与伺服电动机的区别
步进电动机更易实现多轴同步运行
痛点分析:②要求同步性高,因两手臂各轴的机构设计不同,动作响应会因机构增益调整不同而存有差异,同步性的实现更困难。
同步运行多台电动机
想要同步运行多台的电动机时,以开环控制系统驱动的步进电动机更容易使用。
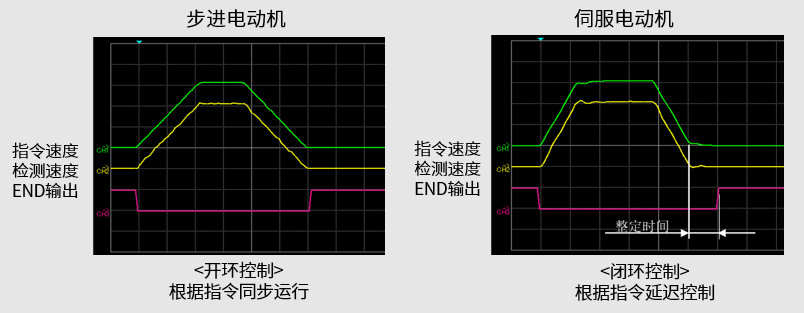
●步进电动机的同步运行
因为是开环控制,无需针对机构进行增益调整,可实现与输入的脉冲进行同步运行。只要脉冲指令同步输入,多台电动机可进行几乎相同的运行。
●AC伺服电动机时的同步运行
因为是闭环控制,必须对应负载的状态做增益调整*,相对脉冲指令发生迟延。控制多台电动机时,因迟延时间各不相同,有互相干扰运行不稳定情况的发生。
*部分伺服电动机支持的自动增益功能,可有助于改善增益调整的效果,提高调试效率。
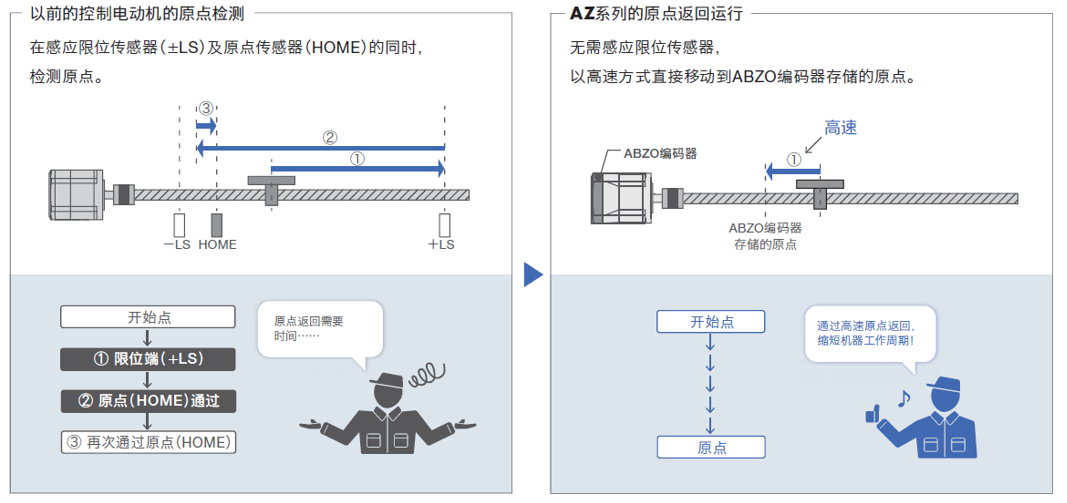
AZ系列步进电动机创造更多的高附加值
搭载免电池机械式绝对式编码器
无需外部传感器的应用,在狭窄空间中也无需考虑空间的设计布局,自由度更高。
无需外部传感器的应用,在狭窄空间中也无需考虑空间的设计布局,自由度更高。