








步进电动机EtherCAT
探针功能(Touch probe )的检测应用

|
晶圆传送盒设备:晶圆放置状态的辅助判断 |
简化控制、提高效率
 |
晶圆传送盒设备:晶圆放置状态的辅助判断
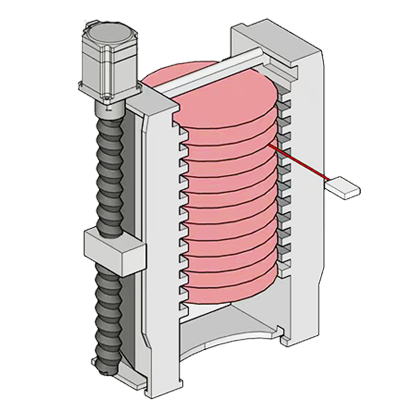
设备:晶圆传送盒机构:螺杆机构 动作概况:通过螺杆机构带动晶圆上、下移动动作,期间利用盒内的传感器进行晶圆放置状态的辅助判断,便于下一工位的取料操作。 痛点:以往控制为上位连接传感器,上位收到信号后,再向驱动器查询当前位置, 根据查询的位置进行判断结论。 上位读取的位置由于信号传送、程序响应等因素,相对实际情况存在滞后且耗时, 影响提高效率。 |


|
利用探针功能将位置锁存读取, 上位更精准、高效 |

|
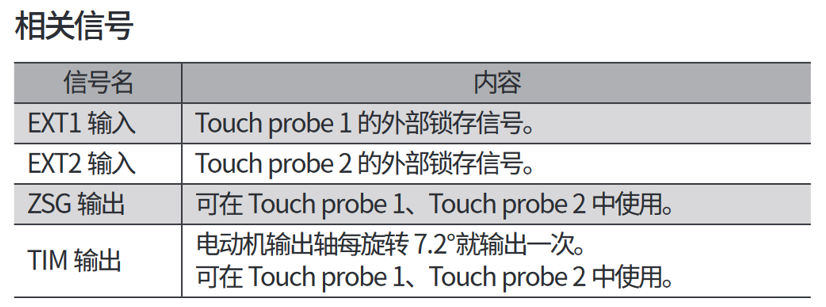
探针功能(Touch probe )
|
探针功能(Touch probe ):
Touch probe 是指将外部锁存输入信号(EXT1 输入、EXT2 输入)或输出信号(ZSG 输出、TIM 输出)作为触发,对输入触发时的位置进行锁存的功能。 |
|

外部传感器信号直接输入驱动器,驱动器接收到传感器信号上升沿与下降沿的输出后,利用AZ系列EtherCAT通讯中的Touch probe功能对上升沿、下降沿触发时的位置进行锁存。 上位根据通讯周期的处理周期,直接周期性读取锁存位置进行应用。
时序示意图:
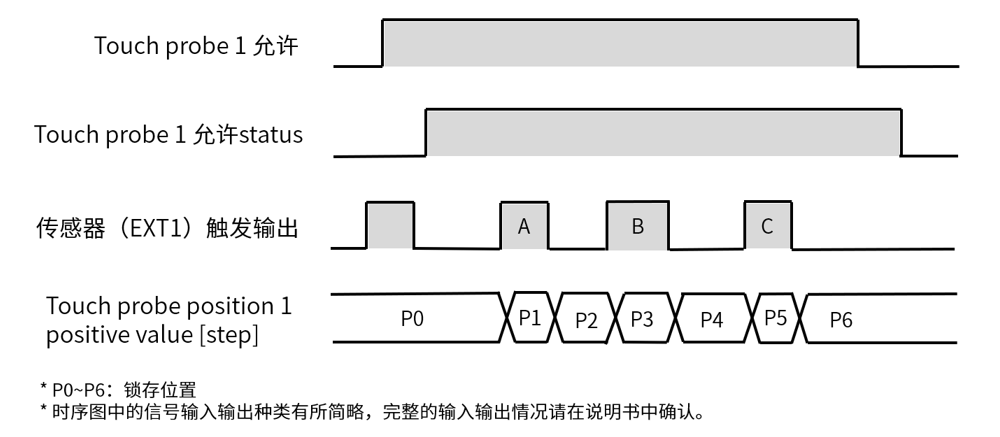
上位通过EtherCAT通讯直接读取EXT1信号上升沿与下降沿锁存位置信息的差值乘以电动机步距角,即可得出测量晶圆的厚度情况进行相关生产的辅助判断应用。
例如:
A的厚度=(P2-P1)*电动机步距角
B的厚度=(P4-P3)*电动机步距角
C的厚度=(P6-P5)*电动机步距角
例如:
A的厚度=(P2-P1)*电动机步距角
B的厚度=(P4-P3)*电动机步距角
C的厚度=(P6-P5)*电动机步距角
简化上位的程序、实现更高效的判断,优化控制程序
AZ系列多种支持EtherCAT通讯的驱动器选择
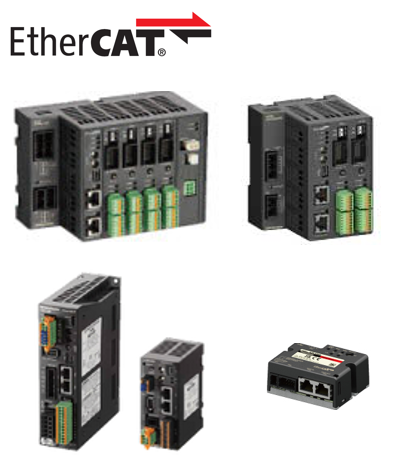 |
AZ系列备有多样化的驱动器类型,其中包括有多轴、双轴、单轴与Mini驱动器,以便适应多种应用场合的选用。
|

相关产品
| |
αSTEP AZ系列 搭载新研发的ABZO编码器,无需电池就能实现绝对方式的定位。 驱动方式有脉冲序列型和可实现I/O控制的内藏定位型供选择。产品种类丰富。 |