








步进电动机振动剖析&解决方案
1步距响应
|
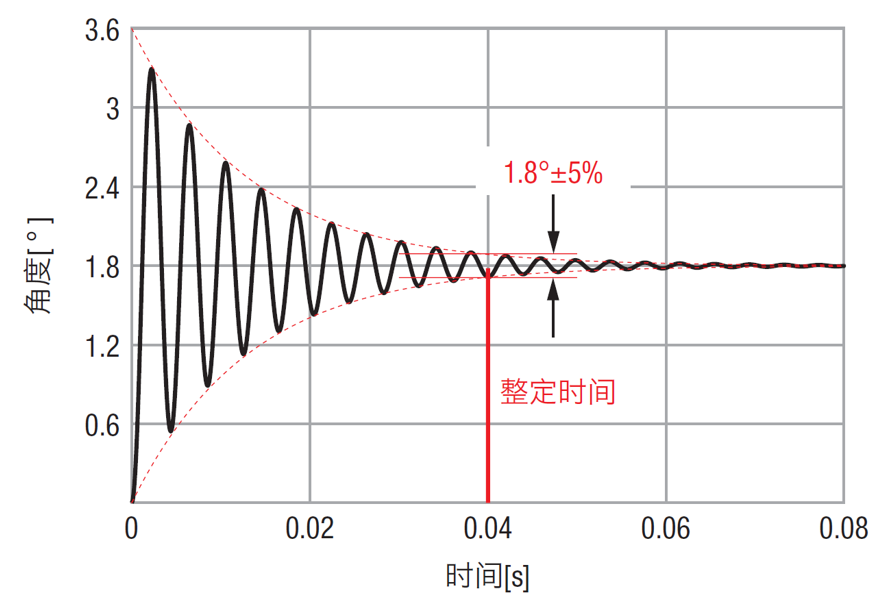
指步进电动机动作1个步距时,转子发生的角度变位。
步进电动机在转动1个步距角,转子到达目标位置后,因转动惯量和角度-转矩特性的恢复力而反复进行衰减振动(过冲·回冲),最终在指定位置停止。 脉冲信号连续输入时,步进电动机的动作由1步距响应的重复叠加形成。因此,随着脉冲信号输入,步进电动机有可能会产生振动的现象。 |
 |
连续步距响应
|
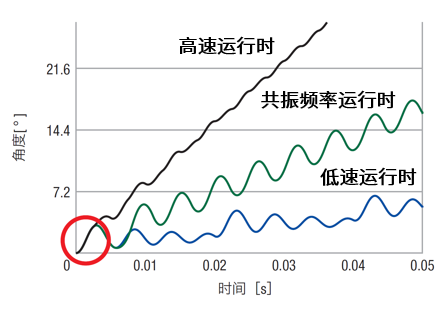
电动机的振动大小受转速影响发生变化。
低速运转:连续产生1步距响应特性。
共振频率:由于持续大幅度过冲・回冲现象重叠,振动较大。 高速运转: 在产生过冲・回冲之前切换到下一个步距,振动不明显。 |
 |
振动特性的测定
|
◇ 测定工具与方法
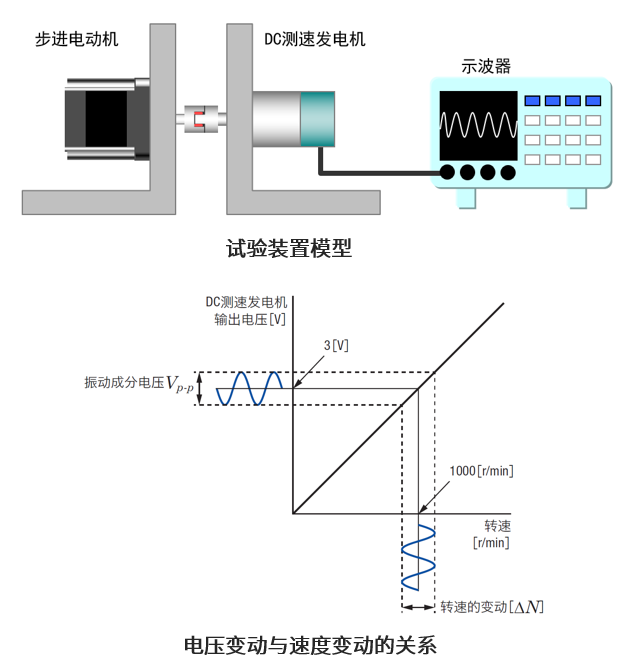
旋转中的电动机动作,通常以速度进行观测。东方马达在观测步进电动机速度时,以DC测速发电机(1000 r/min 下3 V 输出)为手段。
DC测速发电机将检测到的转速变换成直流电压输出,
通过测定电压变动进行测定步进电动机的振动的大小。 如图所示,电压变动与速度变动的关系呈比例关系。 |
 |
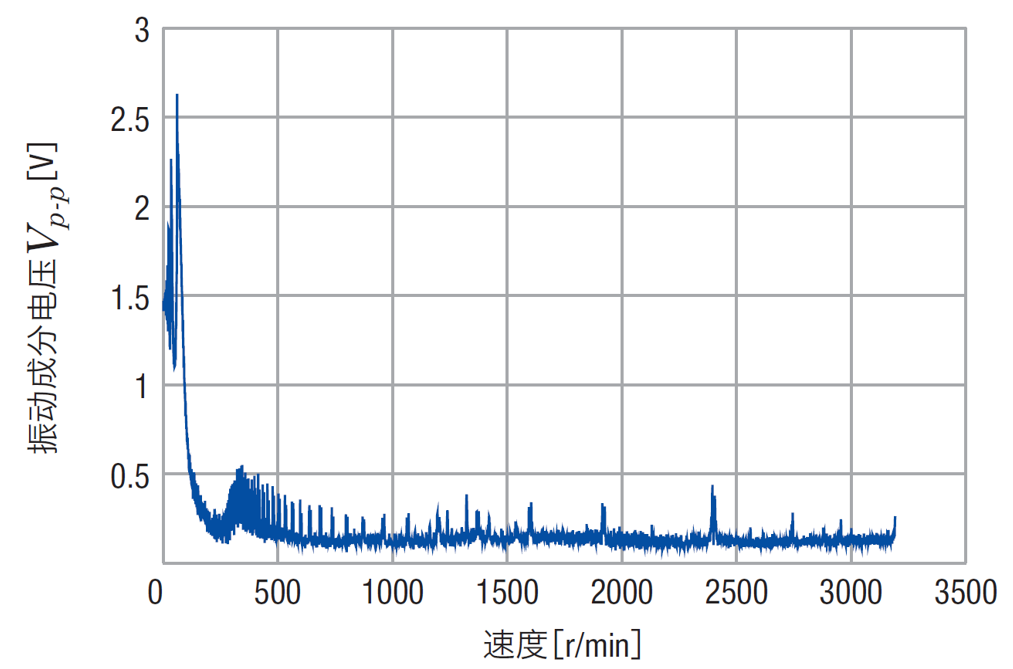
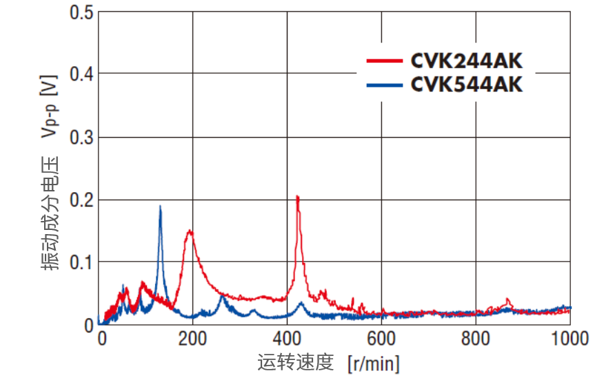
◇2相步进电动机整步驱动下的振动特性
其中,振动剧烈变大时的某一脉冲频率(速度)领域称为共振频率。
其中,振动剧烈变大时的某一脉冲频率(速度)领域称为共振频率。
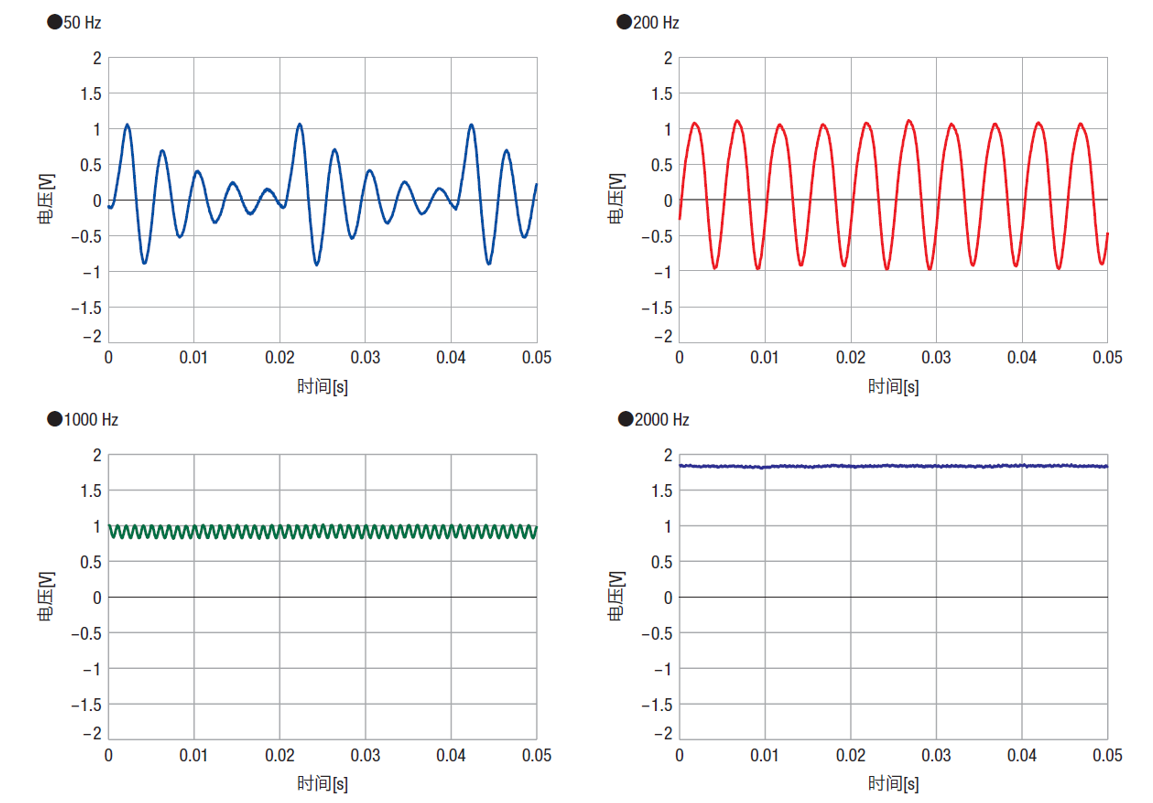
◇不同速度下DC测速发电机的输出波形
随着速度的提高,振动越小。
随着速度的提高,振动越小。
▲回到页首
--------振动产生的原因---------
▲回到页首
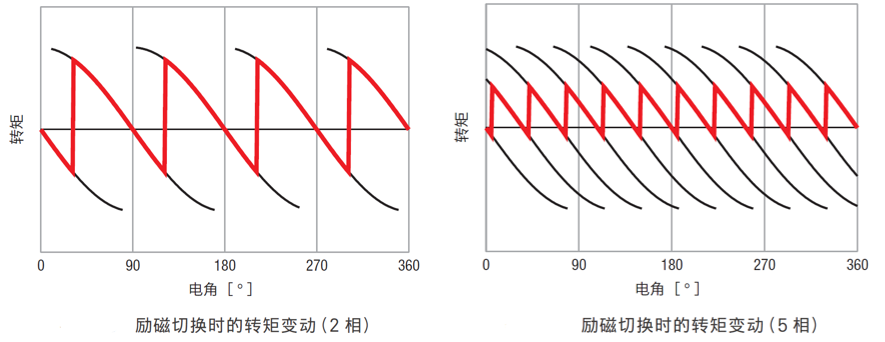
转矩的变动
低速下的大幅振动是步距动作时的转矩变动引起的。励磁切换意味着在极短时间内造成角度-转矩特性的移动,
因此会发生转矩跳跃,导致速度变动。
如果步距角度比例变小,则励磁切换时的转矩变动也小,振动随之变小。
|
POINT
5相步进电动机从结构上拥有比2相更好的振动特性。 可有效降低振动。
|
 |
惯性负载的影响
|
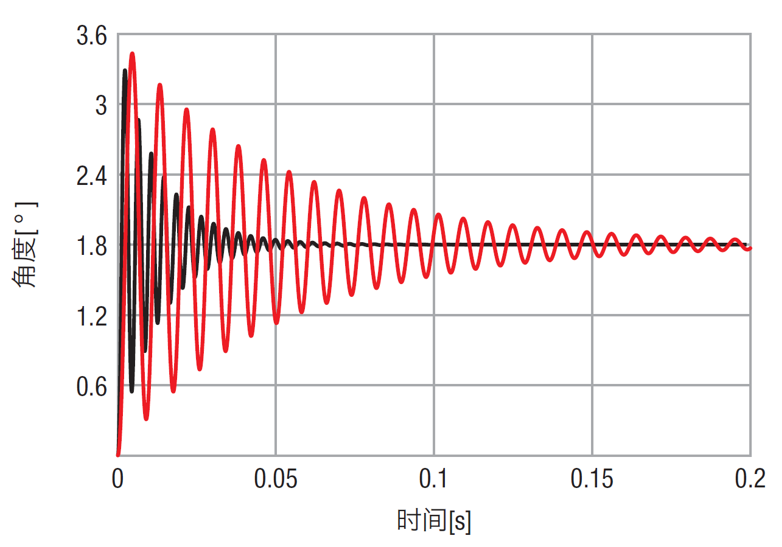
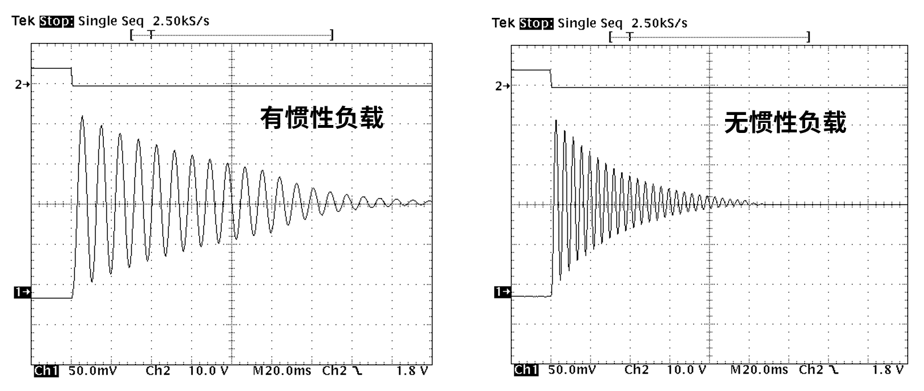
施加惯性负载时,振动周期会被放大。即使电动机转矩相同,但如有惯性负载,则加速度会减小,动作会变得缓慢。
右图是用1步距响应来表示惯性负载的影响。
●黑线为电动机单体状态。红线为转子附加3倍转动惯量的状态。
●由于总惯性增加了4倍,因此振动周期为2倍,振动衰减时间约为4倍。
|
 |
--------振动特性的改善提案---------
▲回到页首
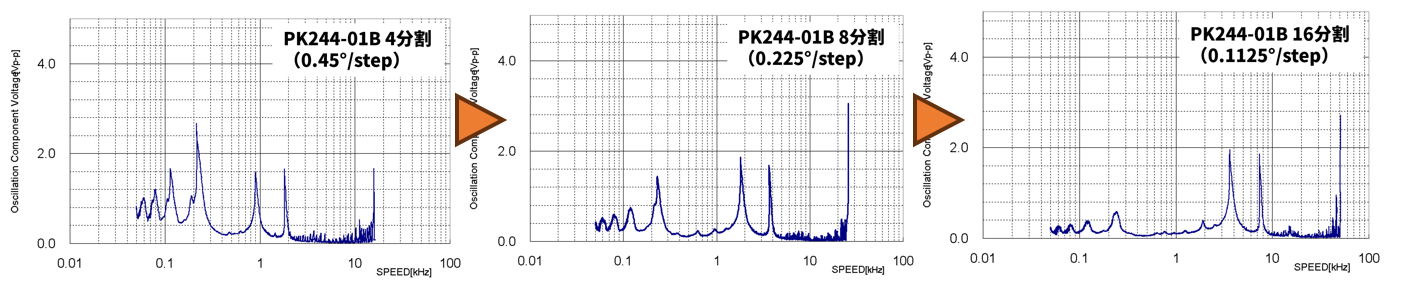
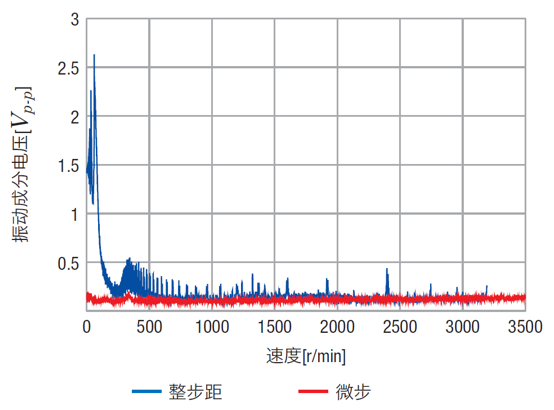
微步驱动
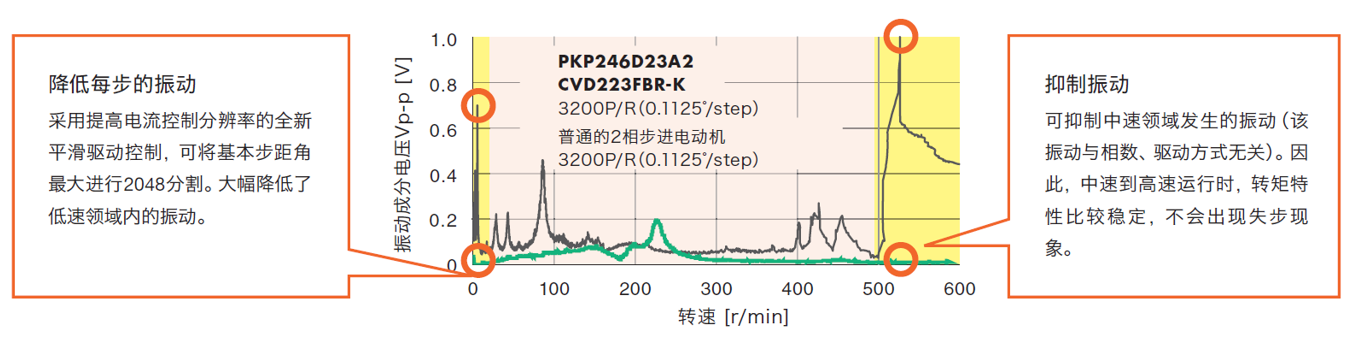
◇缩小步距角,降低过冲·回冲
微步驱动是将输往步进电动机各线圈的电流作细分化分配,使定子的磁通量变化平顺。步进电动机步距角变小,同时抑制转矩余波。
通过驱动电路实现电流的微小变化,将步距角细分化的微步技术,有效降低振动与噪音。
微步驱动是将输往步进电动机各线圈的电流作细分化分配,使定子的磁通量变化平顺。步进电动机步距角变小,同时抑制转矩余波。
通过驱动电路实现电流的微小变化,将步距角细分化的微步技术,有效降低振动与噪音。
|
POINT
2相CVD驱动器的电流控制分辨率(平滑驱动控制)最高可达2048*200=409600分割/转。 |
 |
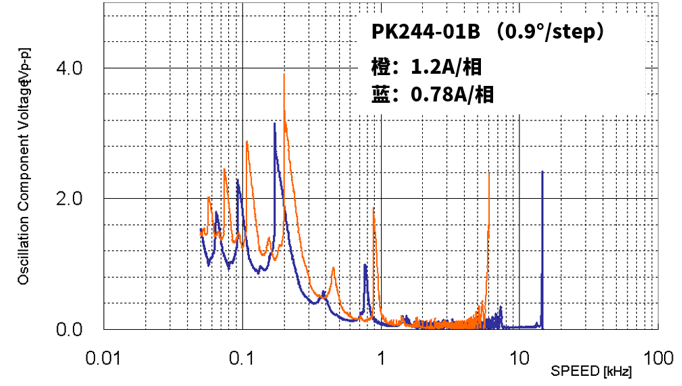
降低驱动电流
|
◇去除多余的转矩
降低驱动电流*以消减多余的转矩,减小转矩跳跃产生的影响。
*注意确认满足转矩安全率 |
|
POINT 分辨率不高时, 如多余的转矩过大, 转矩跳跃的影响会变大, 从而产生振动, 严重时会造成电动机失步。 |
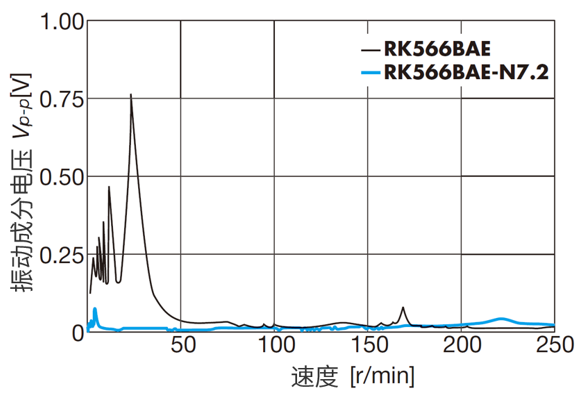
使用减速机型电动机
|
◇ 避开共振频率
使用减速机时,电动机转速提高,可避开振动较大的低速领域、共振频率。
同时减小因惯性负载过大而产生的抖动,缩短定位时间,但最高速度会降低。
|
|
POINT 圆盘、摆臂等 大惯量机构, 惯性比过大会造成振动, 甚至失步。 |
增加惯性负载
|
◇ 改变共振频率
适当的增加惯性负载*可改变共振频率, 从而减小振动。
*注意确认满足转矩安全率 |
 |
增加摩擦负载
|
◇ 加快振动衰弱
增加摩擦负载*使得转子的动作延迟。摩擦负载对振动频率没有影响,但由于摩擦负载会吸收振动能量,会加快振动衰减。 *注意确认满足转矩安全率 *注意停止精度可能会变差 |
 |
使用制振器
|
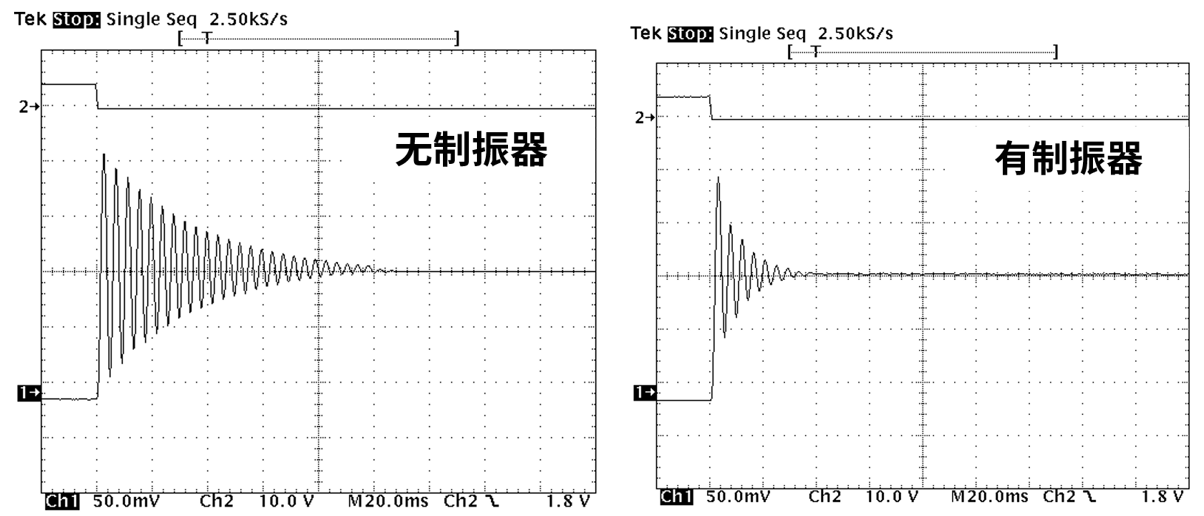
◇ 吸收振动能量
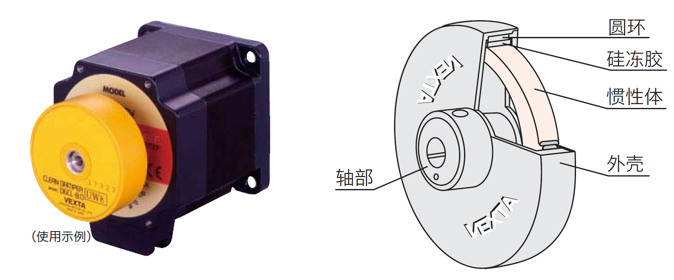 是一种可有效抑制步进电动机的振动及改善高速性能的机械式阻尼器。 惯性体与硅冻胶密封于塑料外壳内,由硅冻胶吸收振动能量,并转化成热能。 |
 |
使用高分辨率型电动机
|
◇ 缩小步距角·避开共振频率领域
从电动机机械结构上改变共振频率,以减小振动。  |
POINT 当微步驱动的分辨率设置最大时,高分辨率型比标准型的分辨率多出一倍,可进一步减少振动。  |
--------东方马达技术设计·助力实现低振动性能---------

优异的电流控制
|
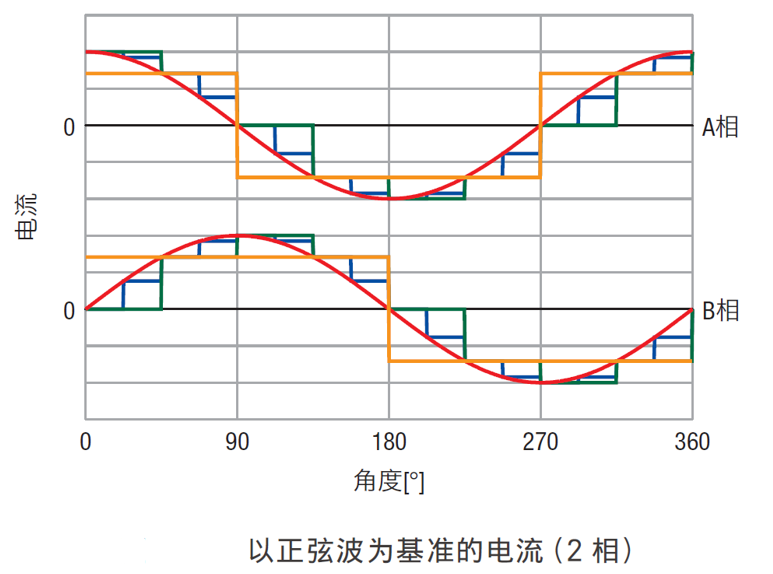
◇ 以正弦波为基本的驱动
为保证发生转矩恒定,步进电动机实现的关键是“切换”线圈的电流,如电流波形按矩形波方式进行的运行。此时,无法保证发生转矩保持恒定,存在转矩变动导致振动变大的速度区间。 东方马达驱动器对电流波形进一步细分分割后,电流波形逐渐接近正弦波的现象,故此能够顺畅的运转。  |
 |
◇ CVD系列全速领域微步驱动
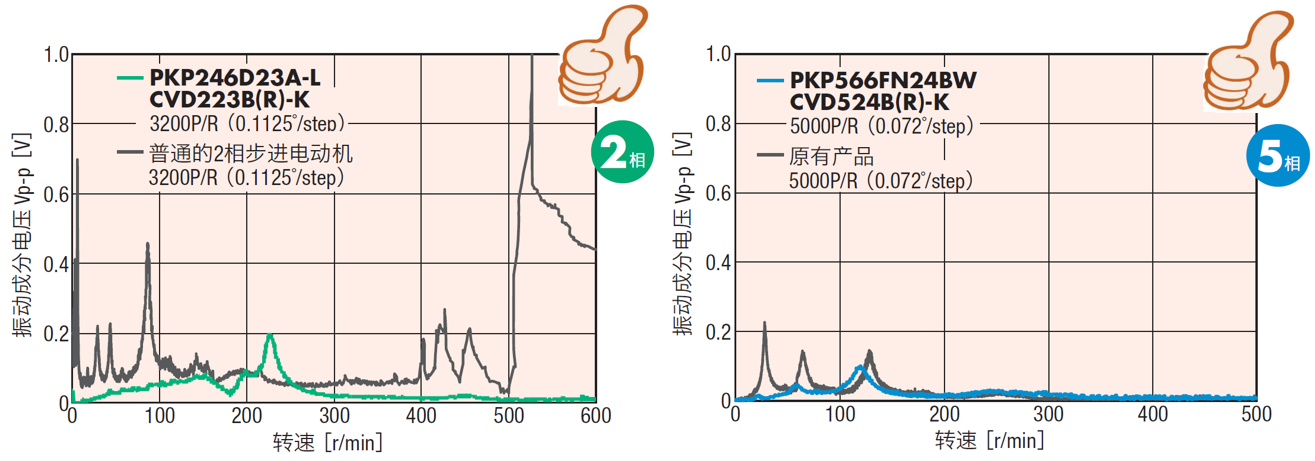
采用全数字控制的微步驱动器,电流控制实现数字化,大幅改善振动幅度,全速度领域实现更低振动和噪音。
采用全数字控制的微步驱动器,电流控制实现数字化,大幅改善振动幅度,全速度领域实现更低振动和噪音。
◇平滑驱动控制
减小步距角以降低过冲·回冲,实现正弦波电流驱动,使用整步也能平滑运行。
减小步距角以降低过冲·回冲,实现正弦波电流驱动,使用整步也能平滑运行。
实时独立的电流检测
|
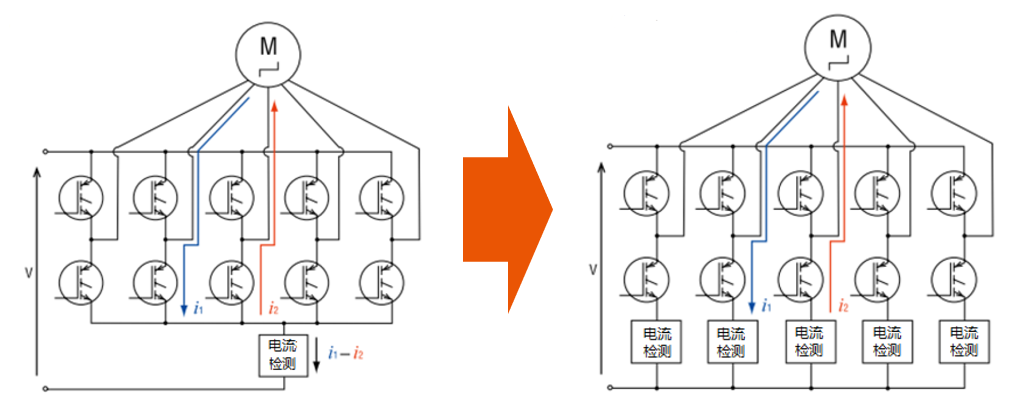
◇ 各相电流独立检测
该设计能正确检测出电动机的输入电流。但需使用较多的检测电路和检测信号,电路构成较为复杂。CVD驱动器通过数字化控制进行了弥补。 |
 |
高精密的电动机制造
|
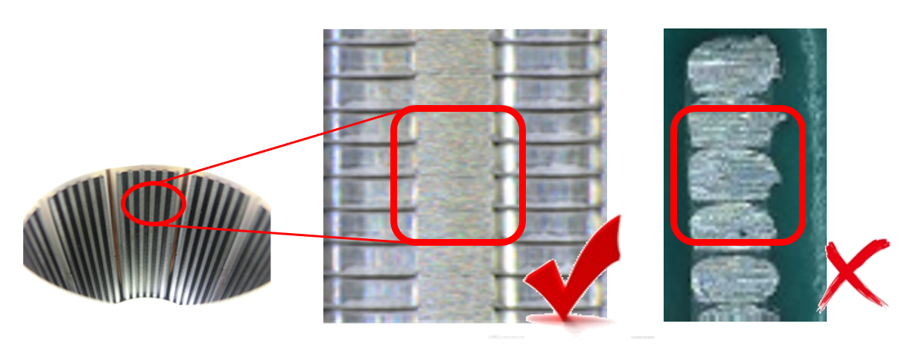
◇ 精加工的定子/转子小齿
对转子·定子上的小齿施行研磨精加工,内部加工精度的差距对于特性表现是相当明显。 这是影响步进电动机停止精度的精准性、振动的重要因素之一! |
 |
全速度领域 低振动·低噪音
CVK系列5相具有更佳的振动特性。
相关产品

注意:本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。