








化学机械抛光(CMP)设备应用提案
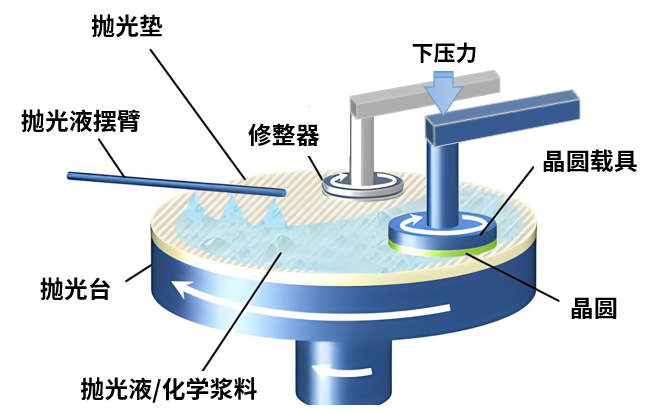
| CMP设备在转台上使用多个摆臂机构,比如将如抛光垫修整器等移动到位的机构。 下面我们将为您介绍CMP机械臂机构的课题解决方案! |
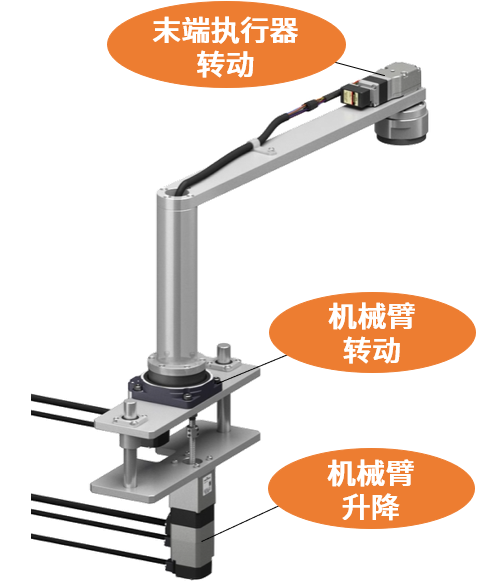
机械臂机构及主要驱动源
为保证在整个晶圆上均匀分配适量的材料,CMP工艺在材料去除过程中施加不同的力,并精确停止。
因此,为摆臂机构提供精确定位控制非常重要,合理的选用响应快速的驱动源,以避免抛光过多的基材。
|
|
机械臂 升降 –— DRS2系列 兼顾高精度、小型化与大可搬运质量
目的:将摆臂升降移动定位,以便进行接触抛光或高度调节等操作。
通过组合高精度的αSTEP AZ系列和滚珠螺杆,在机械臂升降工位上提供高精度定位的DRS2系列小型电动缸方案,与自行组装的机构相比,装置全长缩短、更紧凑。
目的:将摆臂升降移动定位,以便进行接触抛光或高度调节等操作。
通过组合高精度的αSTEP AZ系列和滚珠螺杆,在机械臂升降工位上提供高精度定位的DRS2系列小型电动缸方案,与自行组装的机构相比,装置全长缩短、更紧凑。

|
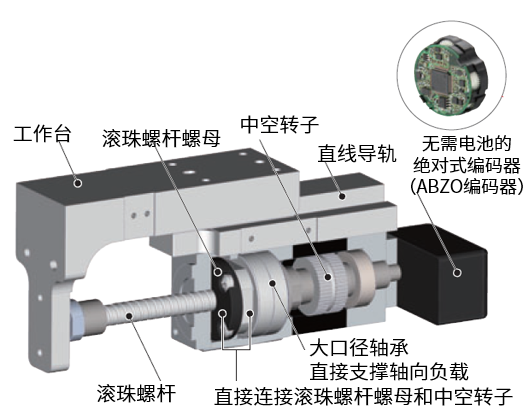
 小型电动缸 DRS2系列 |
适用于微小移动量·高精度定位
| 中空转子和滚珠螺杆螺母一体化的紧小型机体,可实现装置的高精度定位与小型化。 不需要连接部件,减少因联轴器等连结部件而产生的精度影响,实现更高精度的定位。 ●驱动螺杆分为研磨滚珠螺杆和滚轧滚珠螺杆2种 【最小移动量】0.001mm 【反复定位精度】 研磨滚珠螺杆:±0.003mm 滚轧滚珠螺杆:±0.01mm
|
 |
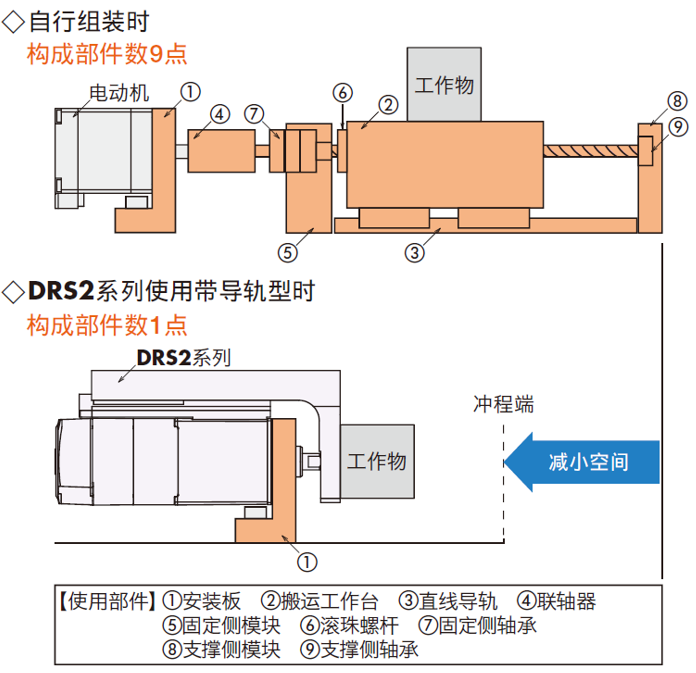
减少连结部件,实现省空间化
|
将工作物移动相同冲程量时的两种构成范例, 以下为构成部件数的比较。
|
应用:半导体制程设备(晶圆Pin针顶升机构) (▶点此查看详细介绍) 设备空间小型化要求加剧,面向多层化、多腔体的半导体制程相关设计,DRS2系列小型电动缸充分发挥降低高度方面的小型化应用优势。 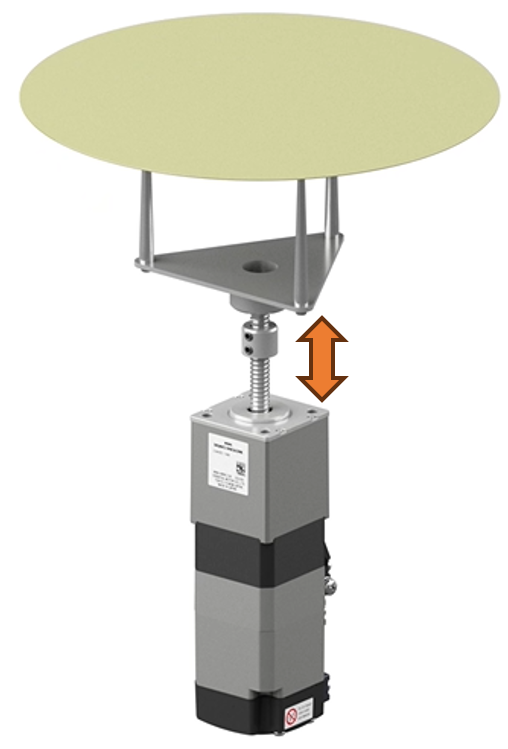 *图示仅供示意参考,需外置导轨设计。
|
垂直可搬运质量
|
以下为各规格可垂直搬运的负载质量,实际选用请结合机构负载设计及驱动条件综合选型计算, 可进一步洽询东方马达。(▶点此查看各销售点联络方式)
|
应用:半导体制程(晶圆清洗设备)设备 (▶点此查看详细介绍) 机械臂的升降设计采用小型电动缸驱动,无需过多的配件设置,搭载机械式绝对编码器应用,整体设计更简洁、紧凑。 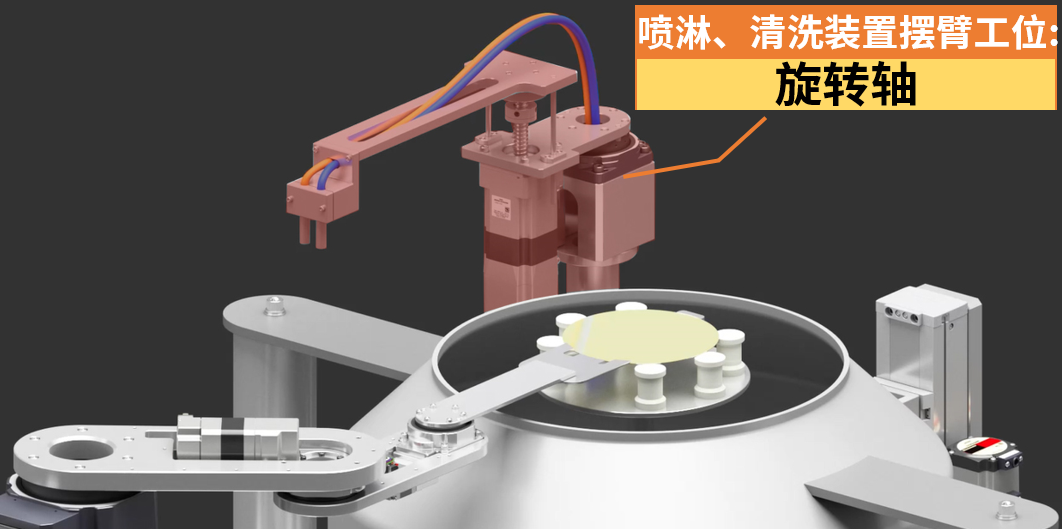 |

断电时保护的带电磁制动
电源OFF时,保持停止位置。带电磁制动规格的采用,即使垂直安装,也不必担心维护作业中机械臂掉落。
