








晶圆Pin针顶升工位·小型电动缸应用提案
装置概要
半导体的工艺发展对设备的要求逐步提升,对每个轴的动作也愈发严格。小型化、高效率、高精度、低振动……众多需求在机构上的设计应用,以下将为您介绍各类提案:
 *图片仅供示意
|
实现动作
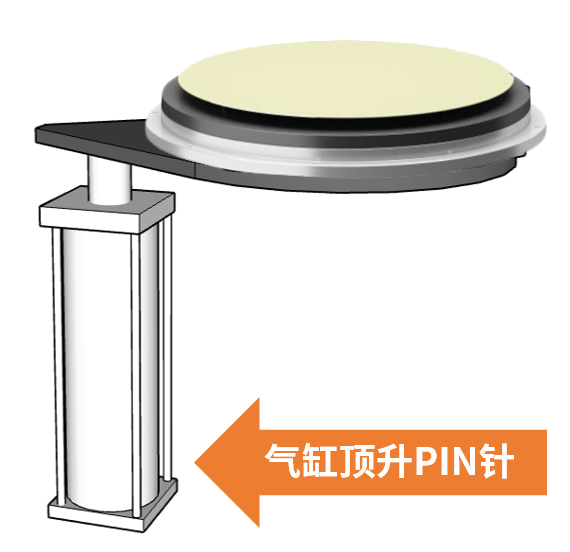
将吸附于平台上的晶圆片通过Pin针顶起,以便于利用搬运机械手进行取、送晶圆片。 ※晶圆顶起前,会通过“静电吸附”、“真空吸附”等方式附着在平台上。 机构痛点·难题
• 吸附型平台采用气缸顶升PIN针,晶圆可能出现“裂片”。• 需顶升大尺寸晶圆,实现大负载驱动。 • 实现小型化。 • 提升效率,提高空间利用率。 |
课题:晶圆裂片/晃动、位置偏离
例如:吸附型平台会出现未完全解除吸附力的情况,导致顶升时晶圆片短时间内仍吸附于平台上。
痛点分析:
采用气动为动力源的顶升机构,气动顶升动作无加速过程,易导致:
●突然顶起时的瞬间推力过大,有导致晶圆裂片的可能。
●高速升降、起停时不平稳,导致晶圆晃动、位置偏离。
解决方案: 改变驱动方式:气缸驱动→电动缸驱动
小型电动缸动力源采用步进电动机,可轻易实现平稳加/减速设定。
即使有吸附力残留,因初期有缓慢加速过程,不会对晶圆造成瞬间冲击。顶升后,平滑的减速、停止过程,实现晶圆平稳顶升,同时保证停止精度。
适合稳定进给的驱动轴。
*不改变脉冲输入设定,以整步时的移动量、速度自动进行微步驱动的控制。

注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
例如:吸附型平台会出现未完全解除吸附力的情况,导致顶升时晶圆片短时间内仍吸附于平台上。
痛点分析:
采用气动为动力源的顶升机构,气动顶升动作无加速过程,易导致:
●突然顶起时的瞬间推力过大,有导致晶圆裂片的可能。
●高速升降、起停时不平稳,导致晶圆晃动、位置偏离。
解决方案: 改变驱动方式:气缸驱动→电动缸驱动
小型电动缸动力源采用步进电动机,可轻易实现平稳加/减速设定。
即使有吸附力残留,因初期有缓慢加速过程,不会对晶圆造成瞬间冲击。顶升后,平滑的减速、停止过程,实现晶圆平稳顶升,同时保证停止精度。
适用于微小移动量·高精度定位
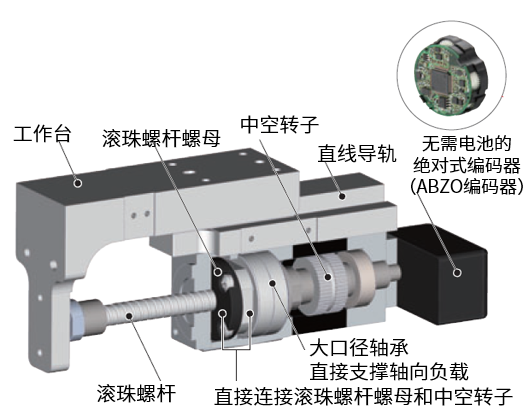
| 中空转子和滚珠螺杆螺母一体化的紧小型机体, 可实现装置的小型化。 无需连接部件,减少因联轴器等部件而产生的精度影响, 实现更高精度的定位。 ●驱动螺杆分为研磨滚珠螺杆和滚轧滚珠螺杆2种 【最小移动量】0.001mm 【反复定位精度】 研磨滚珠螺杆:±0.003mm 滚轧滚珠螺杆:±0.01mm
|
 |
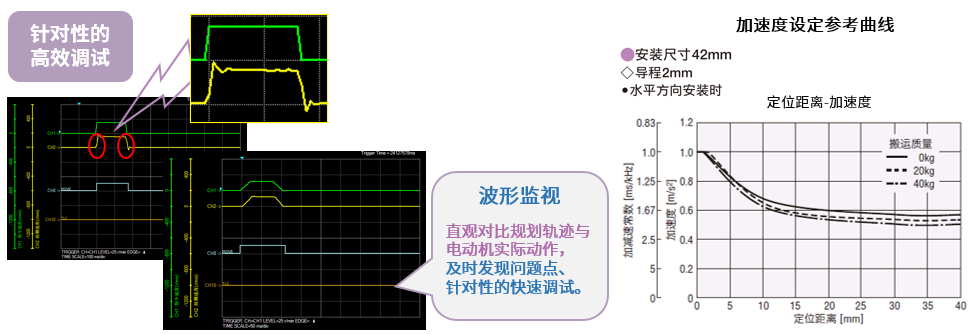
支持稳定、平滑的加/减速设定
小型电动缸驱动支持加/减速过程的设定,同时可利用驱动器波形监控功能监控电动机的运行状态及输出信号的状态,
助力于装置的研发和便捷调试等用途。
低速且平滑的动作
采用微步驱动、平滑驱动功能*,可抑制低速振动,实现平滑移动。适合稳定进给的驱动轴。
*不改变脉冲输入设定,以整步时的移动量、速度自动进行微步驱动的控制。
搭载产品
▶点此下载小型电动缸 DR/DRS2系列(搭载AZ系列)产品目录
|
▶小型电动缸DR系列(搭载αSTEP AZ系列) 因此无需原点传感器、限位传感器等外部传感器。
|

|
|
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。