








αSTEP AZ系列七轴多关节机器人演示
↓↓点击以下相关内容查看七轴多关节机器人样机相关解说↓↓
搭载无需电池的 机械式绝对编码器可保持位置信息
αSTEPAZ系列搭载无需电池的机械式绝对编码器(ABZO编码器)。定位运行中,
即使电源非正常停止或发生停电,也能保持位置信息。
▶点此查看AZ系列产品介绍
▶点此查看AZ系列产品介绍

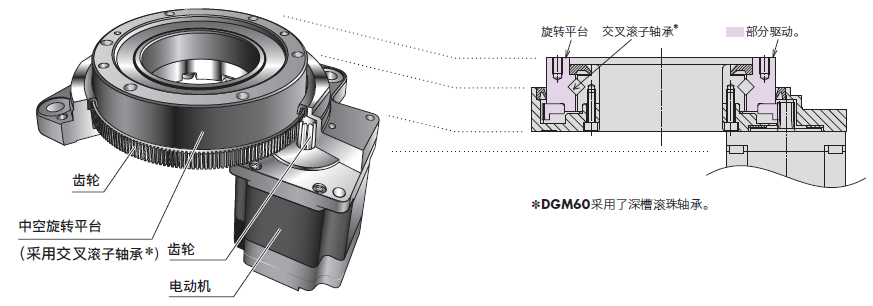
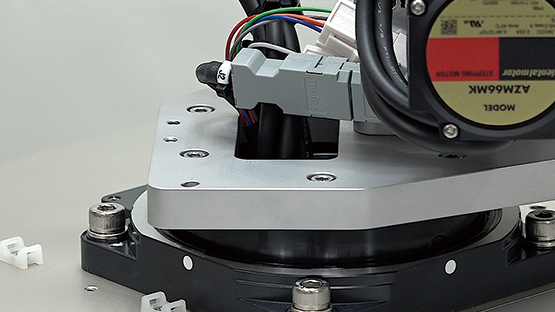
此装置中的夹爪夹取工作物时,惯性力矩负荷会增加。而DGⅡ系列的中空旋转平台采用交叉滚子轴承✽,
实现了高输出功率、高刚性。因此机械臂可以伸得更长,有助于扩大机器人的可动范围。
▶点此查看DGⅡ系列(搭载AZ)产品介绍
实现了高输出功率、高刚性。因此机械臂可以伸得更长,有助于扩大机器人的可动范围。
▶点此查看DGⅡ系列(搭载AZ)产品介绍
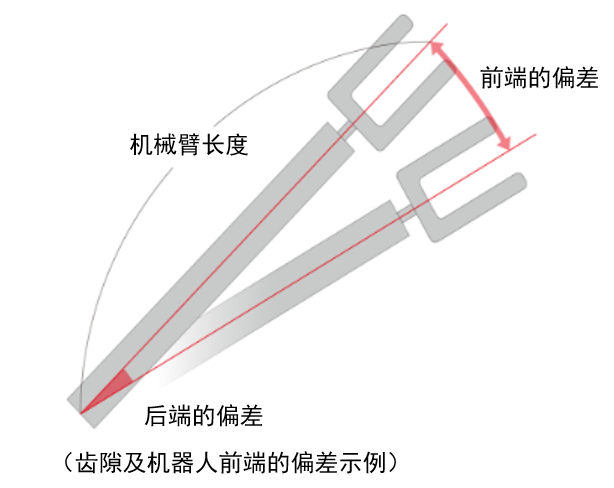
即使是很小的偏差,到了机械臂的前端也会变大,可能导致无法正确抓取工件。
因此采用谐波减速机无齿隙,定位精度高。
因此采用谐波减速机无齿隙,定位精度高。
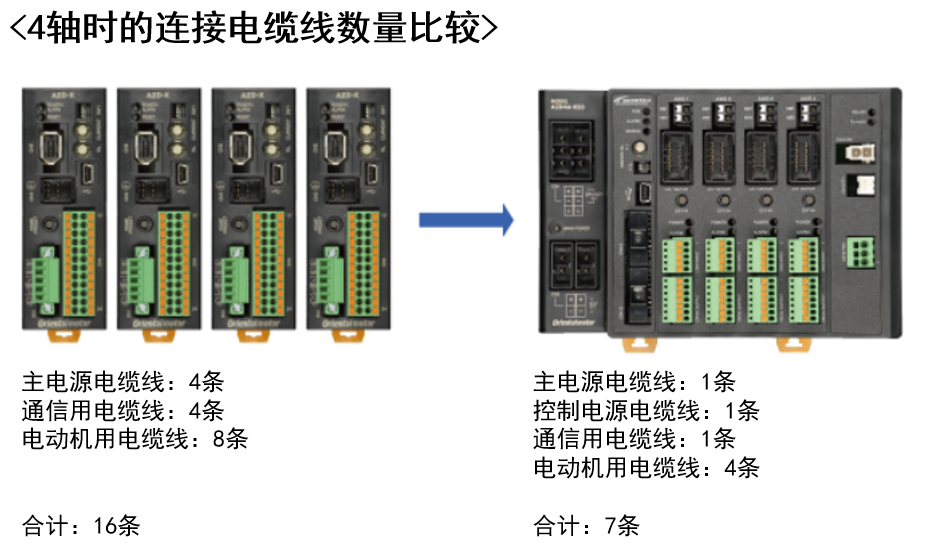
小型化、配线简单
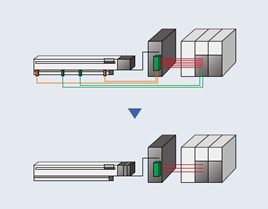
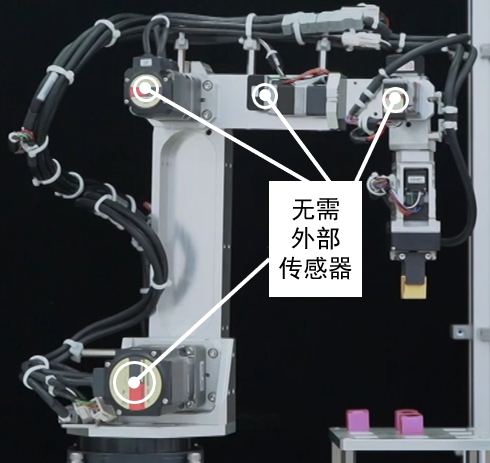
1.αSTEPAZ系列无需传感器
αSTEPAZ系列无需原点传感器、限位传感器等外部传感器,配线简单,节省安装空间,机器人轴运动更灵活。
▶点此查看AZ系列产品介绍
▶点此查看AZ系列产品介绍
 |
 |
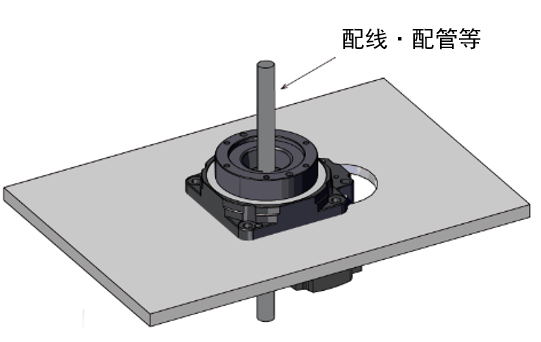
2.DGⅡ系列的大口径中空孔用于配线配管
机器人搭载的动力电缆线,集中在机械臂底端。DGⅡ系列的大口径中空孔(贯穿),可用于配线、配管。
动力电缆线可从中空孔通过,避免了复杂的配线。▶点此查看DGⅡ系列(搭载AZ)产品介绍
可用于抓持各种类型的工件,并能实现各种抓持动作
1.可用于抓持各种类型的工件
可根据抓取对象,自由设定EH系列的抓持力。因此,可以抓取各种各样的工件。(冲程25mm)
可根据抓取对象,自由设定EH系列的抓持力。因此,可以抓取各种各样的工件。(冲程25mm)
▶点此查看:电动夹爪 EH系列(搭载AZ)产品介绍

2.可实现各种抓持动作
可自由设定EH系列的抓取位置、抓持时间、抓持力,因此可实现各种抓持动作。
▶点此查看抓持相关视频
▶点此查看抓持具体例

最大抓持力 25N
【抓持力范围(参考值)约6N ~ 25N】
|
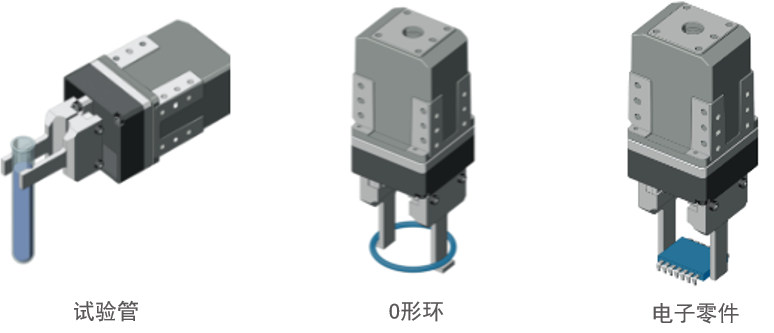 <抓持示例>
|
2.可实现各种抓持动作
可自由设定EH系列的抓取位置、抓持时间、抓持力,因此可实现各种抓持动作。
▶点此查看抓持相关视频
▶点此查看抓持具体例
实时监控
使用支援软件MEXE02,可实时监控电动机的转速、转矩、温度等数据,有助于实现工长自动化。▶点此进入:MEXE02下载页面