








电动夹爪EH系列(搭载αSTEP AZ)-变速抓取样机演示
可实现变速夹取工件,防止其受到冲击。
※点击视频播放(视频可能需要缓冲,请稍等片刻。)
易受损的玻璃、易变形的树脂及弹簧等同样也能安全、稳妥地抓取。
●即将触碰前快速→慢慢抓取
高速接近工作物。即将触碰前减速,可通过低速压推。

●低抓持力抓取→慢慢施加力量
可自由地更改压推力和时间。
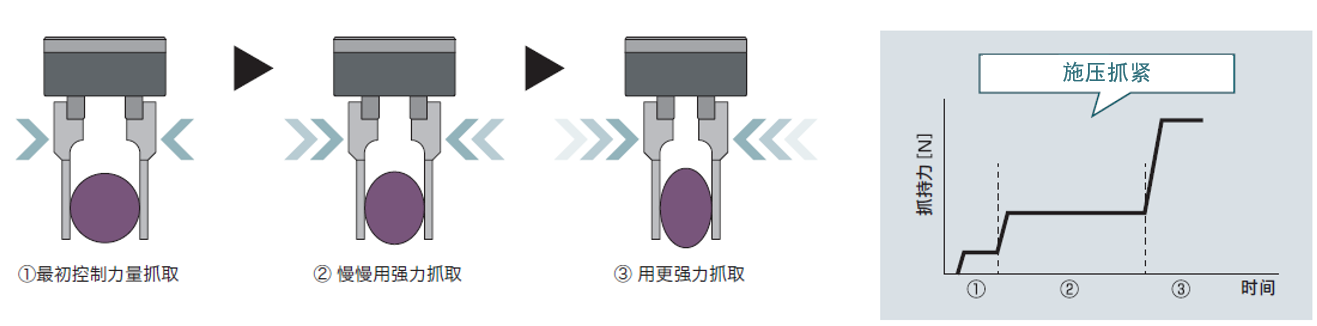
●压推运行时的抓持力特性
通过压推运行进行电动夹爪的抓取动作。
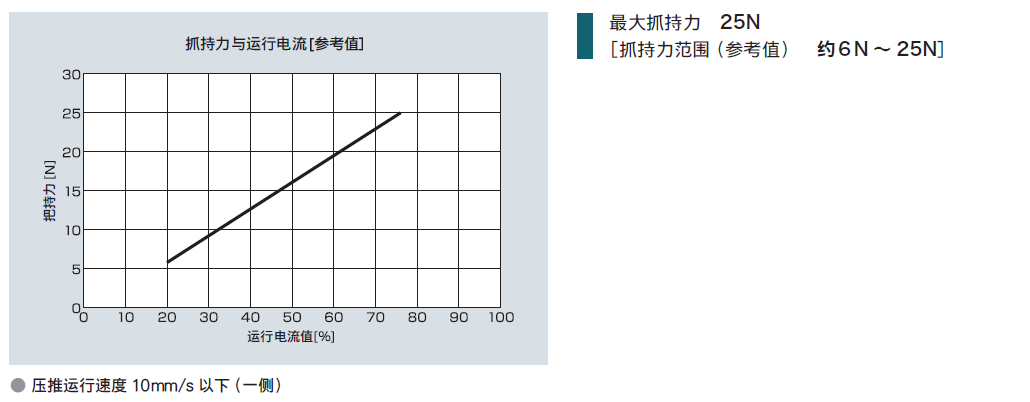
使用电动机运行电流值设定压推力(抓持力)。
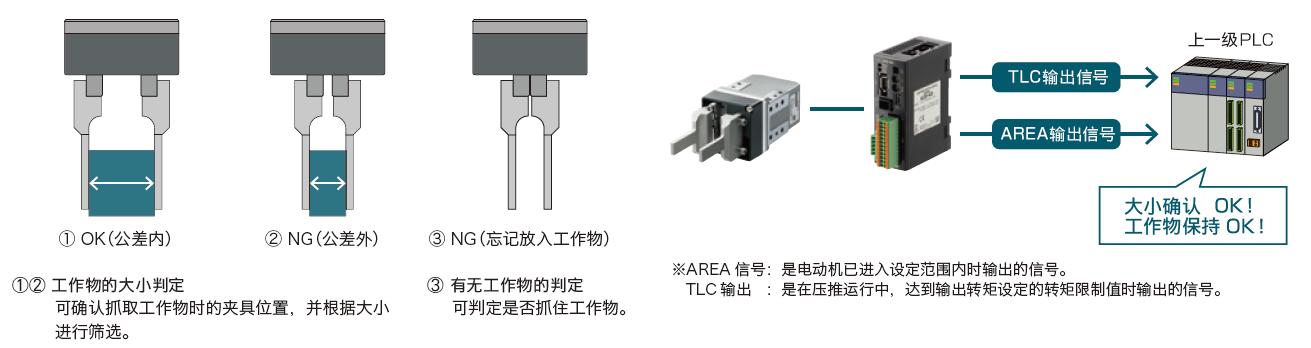
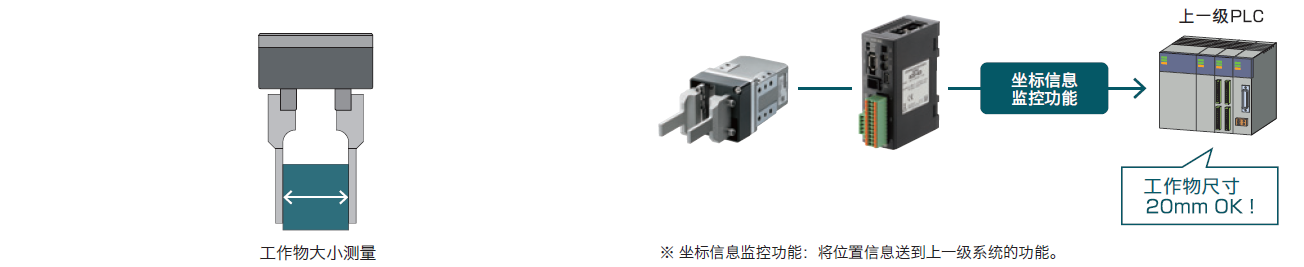
可利用来自驱动器的输出信号(TLC输出、AREA输出)确认手指动作范围,
进行工作物大小及有无工作物的判定。
●监控来自夹爪的位置信息,进行大小测量
利用驱动器的坐标信息监控功能,将来自电动夹爪的坐标信息读取到上一级PLC中,
从而测量工作物大小。
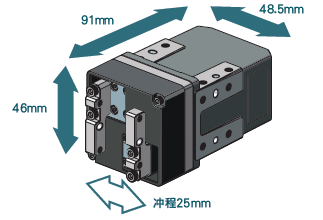
大小为91mm×46mm×48.5mm,质量为380g。
通过将安装尺寸为28mm 的电动机与齿条齿轮机构的组合,实现小型化。
可动部的冲程确保达到25mm。

抓取:稳妥抓取易变形工作物、易受损工作物。
可根据抓取的对象,自由设定抓持力、抓取时间、速度。易受损的玻璃、易变形的树脂及弹簧等同样也能安全、稳妥地抓取。
●即将触碰前快速→慢慢抓取
高速接近工作物。即将触碰前减速,可通过低速压推。
●低抓持力抓取→慢慢施加力量
可自由地更改压推力和时间。
*请另行准备夹具(挂钩)
●压推运行时的抓持力特性
通过压推运行进行电动夹爪的抓取动作。
使用电动机运行电流值设定压推力(抓持力)。
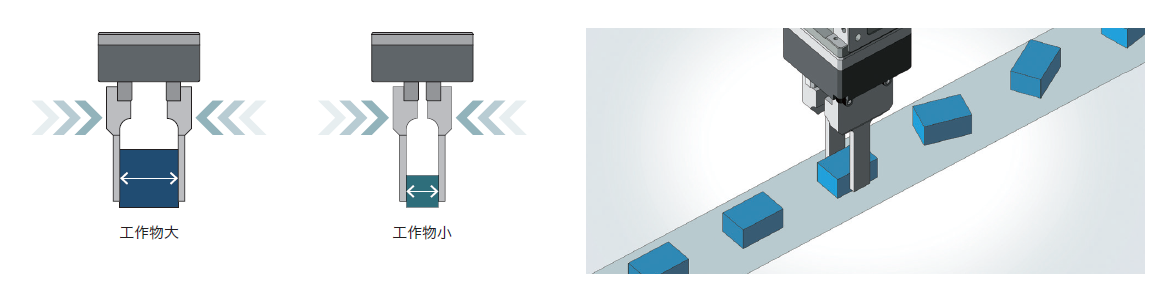
对齐:可对准工作物的朝向及位置。
手指的最小移动量为0.02mm,所以可根据工作物大小进行抓取、对齐朝向及位置。测量:即使没有外部传感器,也能够确认工作物的大小。
●在手指的动作范围内,进行工作物大小及有无工作物的判定可利用来自驱动器的输出信号(TLC输出、AREA输出)确认手指动作范围,
进行工作物大小及有无工作物的判定。
●监控来自夹爪的位置信息,进行大小测量
利用驱动器的坐标信息监控功能,将来自电动夹爪的坐标信息读取到上一级PLC中,
从而测量工作物大小。
*请另行准备夹具(挂钩)
有助于装置的小型化
●小型、轻量大小为91mm×46mm×48.5mm,质量为380g。
通过将安装尺寸为28mm 的电动机与齿条齿轮机构的组合,实现小型化。
可动部的冲程确保达到25mm。