








CVD系列全闭环控制型特征
※点击视频播放(视频可能需要缓冲,请稍等片刻。)
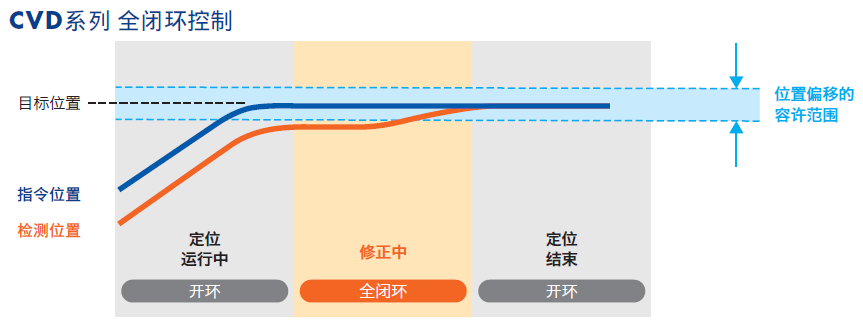
从位置指令结束开始,使用外部传感器的反馈,通过全闭环控制进行位置修正。
5相步进电动机驱动器 CVD系列全闭环控制型
| ▶点此查看详细产品介绍 |  |
步进电动机的全闭环控制
在开始定位时,利用步进电动机的高响应进行开环控制,从位置指令结束开始,使用外部传感器的反馈,通过全闭环控制进行位置修正。
实现高精度定位
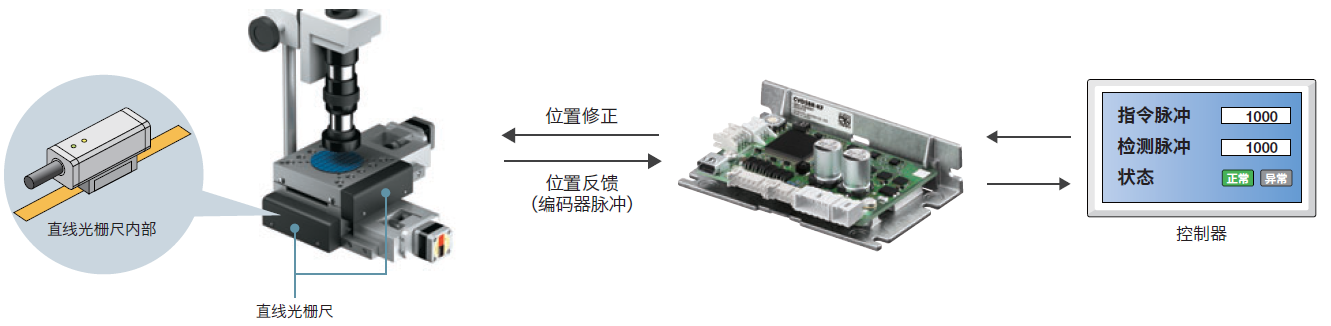
通过直接反馈机构位置的全闭环控制,修正检测位置相对于指令位置的差分(偏差)。
有助于亚微米以内需要高精度定位的装置设计。
有助于亚微米以内需要高精度定位的装置设计。
参考 实测数据
● 空程※1实测数据 |
【测定条件】 螺杆导程1mm 直线光栅尺分辨率0.1μm 位置范围:1cnt ※2 采用激光测长测量
|
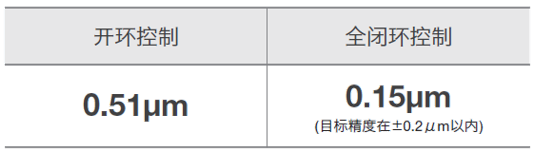 |
※1 电动机从CW或CCW方向对目标位置进行定位,此时的停止位置相对于旋转方向的差。
※2 以编码器脉冲计数1的误差(-0.2~0.2μm)为目标进行修正。
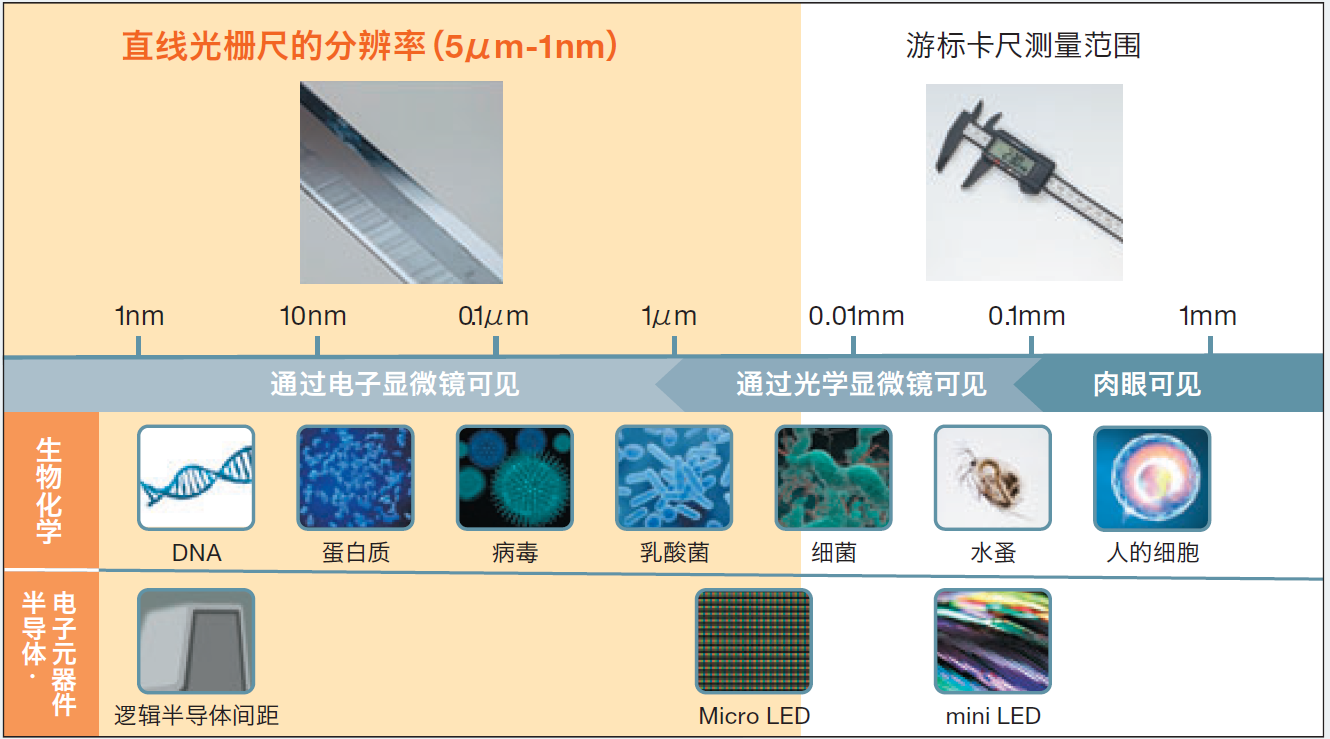
● 直线光栅尺的分辨率
※2 以编码器脉冲计数1的误差(-0.2~0.2μm)为目标进行修正。
● 直线光栅尺的分辨率