








使用BLV系列R型 验证测试2轮驱动和3轮驱动的AGV样机
~ 使用2种类型的AGV样机,进行速度稳定性和操控性的演示实验~ 在AGV/AMR搬送机器人的车轮部分,准备了使用BLV系列R型的两种样机。 两台样机虽然都是3轮的结构,但驱动轮的数量不相同, 分别为:①使用两台电动机驱动的2轮驱动样机、②使用三台电动机驱动的3轮驱动样机。 |
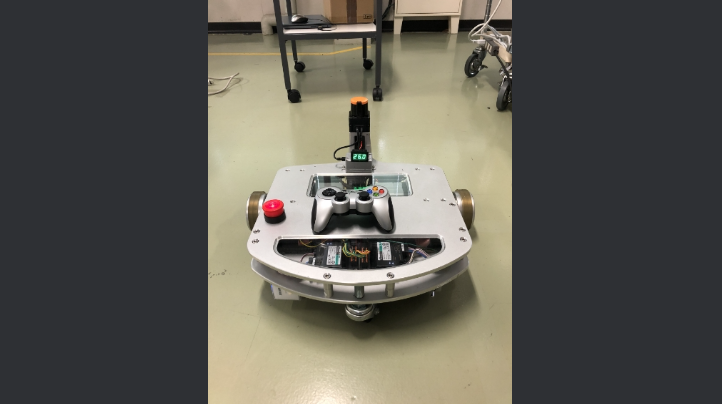
①2轮驱动样机
样机的大小和重量:宽500mm×长480mm×高290mm、包含电池约20kg。电池使用了串联的2个12V5Ah锂电池。
通过利用微型计算机系统的Modbus(RTU)协议控制电动机。
通过控制器(游戏手柄)手动操作。
系统构成
|
|
|
|
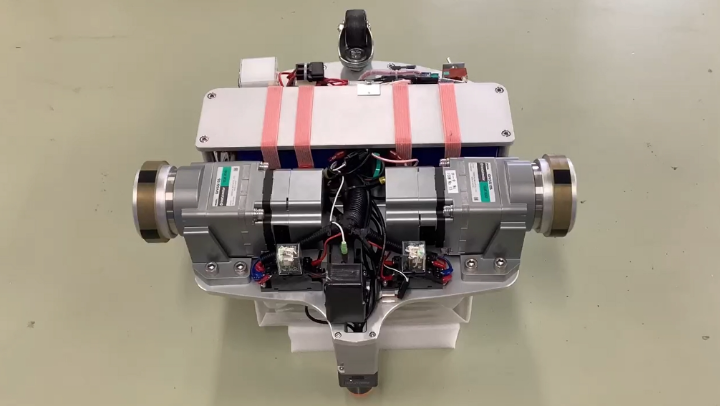
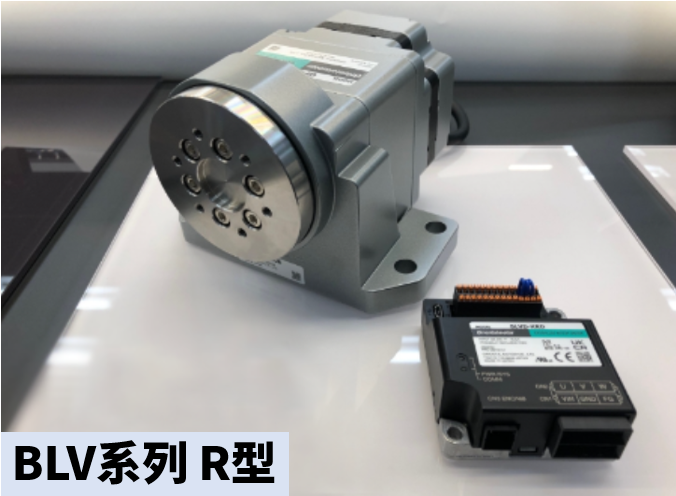
使用产品 BLMR5100KM-10-F×2、BLVD-KRD×2、AGD580B×2 驱动部使用带电磁制动的无刷电动机: 安装尺寸90mm、100W、减速比10。 减速机前端安装法兰输出头使得容许径向负载大幅增加。 可直接安装车轮。 驱动器对应Modbus(RTU)和CANopen。 驱动器尺寸为宽65mm×长75mm×高29mm,重量120g的小型驱动器。 动作电压也为DC15V~55V,故可应对电压变动。 右图为展品示意图。(图中为不带电磁制动的电动机,减速比也不同。)
|
|
|
尝试行驶。
运行反应快,可快速停止。
也请观看翻转过来时的车轮(电动机)动作。
动作分别为:前进→后退→左右旋转。
电动机的速度控制范围为1~4000r/min,可以以1r/min为单位进行速度设定。
如果减速比10、车轮直径100mm,那么AGV样机的速度范围为0.5mm/s~2094mm/s。
如果减速比10、车轮直径100mm,那么AGV样机的速度范围为0.5mm/s~2094mm/s。
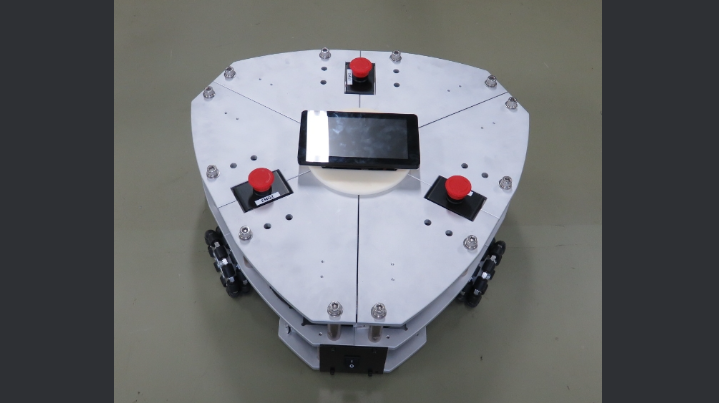
②3轮驱动样机
这种类型小车的特点是支持原地进行全方向、
自如地向四周驱动行驶。
样机的大小和重量:宽589mm×长580mm×高253mm、包含电池约37kg。
电池使用了串联的2个12V12Ah的铅酸电池。
与2轮驱动样机一样通过利用微型计算机系统的Modbus(RTU)协议控制电动机。
通过控制器(游戏手柄)手动操作。
写入了自动运行程序。
但此样机无障碍物检测传感器。
3个紧急停止按钮是为各轴单独演示准备。
样机上方设有搭配微型计算机系统用的触摸屏。
系统构成
使用产品
BLMR5100K-30-B×3、BLVD-KRD×3、AGD580B×3
自如地向四周驱动行驶。
样机的大小和重量:宽589mm×长580mm×高253mm、包含电池约37kg。
电池使用了串联的2个12V12Ah的铅酸电池。
与2轮驱动样机一样通过利用微型计算机系统的Modbus(RTU)协议控制电动机。
通过控制器(游戏手柄)手动操作。
写入了自动运行程序。
但此样机无障碍物检测传感器。
3个紧急停止按钮是为各轴单独演示准备。
样机上方设有搭配微型计算机系统用的触摸屏。
系统构成
|
|

|
BLMR5100K-30-B×3、BLVD-KRD×3、AGD580B×3
使用的电动机与2轮驱动样机相同,但减速比为30。
尝试了使用自动运行行驶。
尝试了使用自动运行行驶。
动作为:后退→逆时针原地旋转→前进→
左右平行移动→菱形运行→180度来回旋转→前进→超低速后退→顺时针原地旋转→停止。
各种运行方式下都能稳定运行。
接下来,将样机翻转后使用自动运行模式运行。
左右平行移动→菱形运行→180度来回旋转→前进→超低速后退→顺时针原地旋转→停止。
各种运行方式下都能稳定运行。
接下来,将样机翻转后使用自动运行模式运行。
电动机速度控制范围为1~4000r/min,可以以1r/min为单位进行速度设定。
实验结论
像这样2轮驱动、3轮驱动的小车均可稳定运行。
同时,BLV系列R型也可以进行定位运行控制。 除了有速度、位置、转矩监控等常见的监控信息, 还能支持内部电压、电动机及驱动器温度等多样化的状态监控。 这两台设备虽然没有运载负载使用, 但若是采用100W、减速比为30的双驱动4轮AGV、大约可以搬运100kg的负载。 (注意:需要综合评估小车框架整体的刚性与车轮的设计确定。) BLV系列R型可以运用于AGV/AMR等搬送机器人的驱动设计中。 ※本实验涉及的数据及结果仅为样机测试值,并非产品规格值。 |
