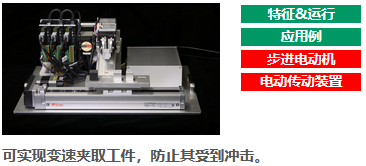
使用电动夹爪EH系列 可轻松调节抓持力
| ~ 电动夹爪可轻松实现抓持位置及抓持力的细微调整。~ |
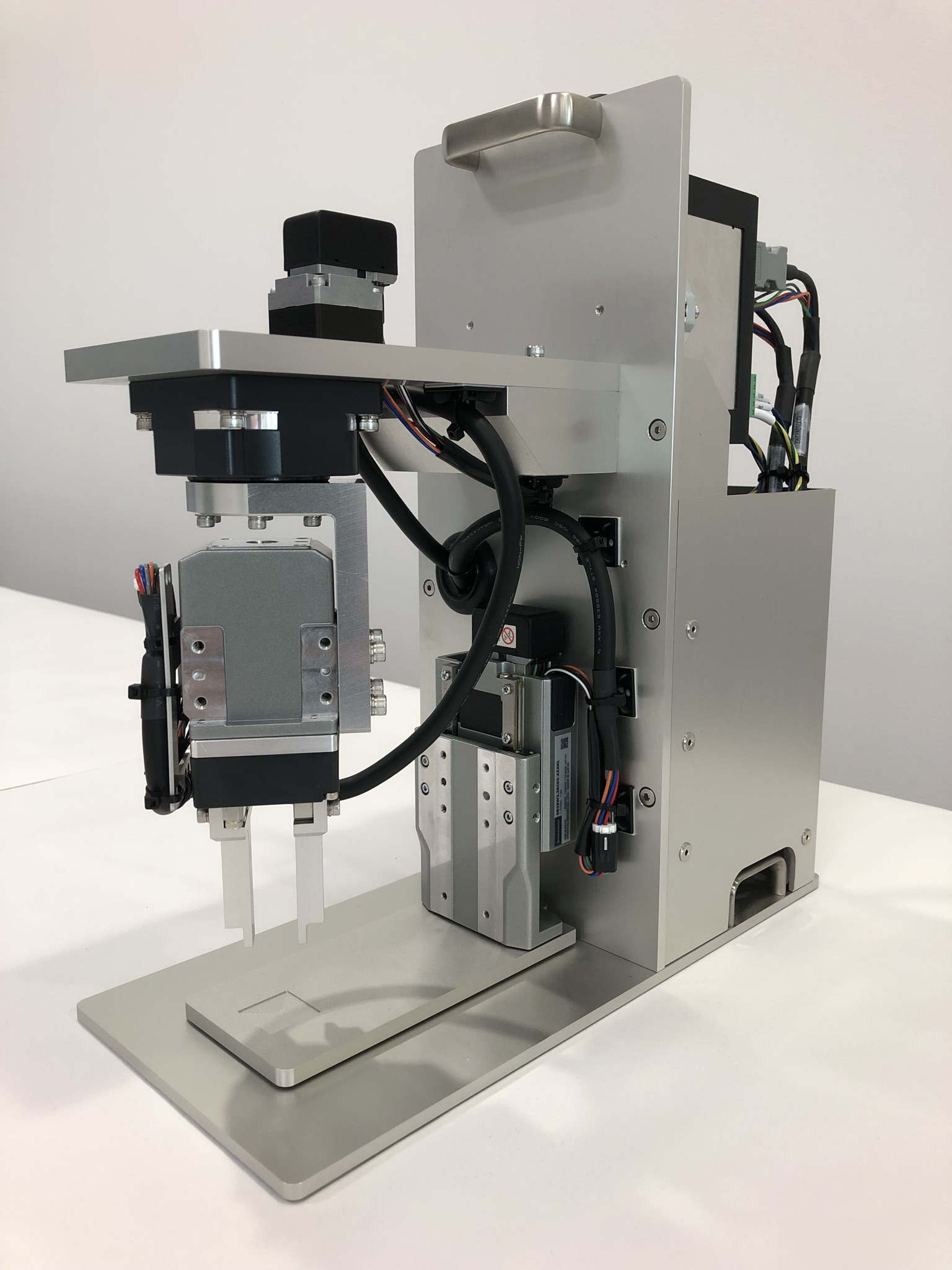
本实验参考模拟机器人末端执行器“抓取”动作,制作了一台小型桌面式样机进行测试。
样机高:约340mm、宽:约140mm。可抓持的工作物宽度为20mm左右。
通过笔记本电脑,以RS-485通信的Modbus(RTU)对各轴进行控制。
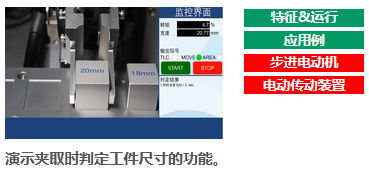
EH系列可精细设定抓持位置及抓持力。
最小移动量为单侧0.01mm,以1%为单位对运行电流进行调节。
最大抓持力为25N。运行电流在75%时可达到此上限值。
另一方面,最小把持力的参考值为7N。运行电流在20%左右可达到此下限值。
规格方面,反复定位精度为±0.02mm,齿隙为单侧0.1mm。
通过实际进行测试。
系统构成
|
|
|
DGM60-AZAK、EH4-AZAKH、DR28W2.5BC03-AZAKL、AZD-KD×3
实机确认①:抓取聚氨酯材料,并且调节抓持力
抓持对象:准备了质地较软,会因抓持力不同而易于变形的聚氨酯材料作为工作物。动作模式为:
工作台上升→工作物抓持(运行电流8%)→工作台下降→
→180度旋转→第二阶段抓持加强(运行电流12%→20%)→抓持减弱(运行电流8%)→
→ -90度为单位旋转×2→工作台上升→放下工作物→工作台下降
视频中的图表显示了180度旋转后的运行电流变化。
运行发生电流变化时,可从聚氨酯材料产生形变的情况了解抓持力的变化。
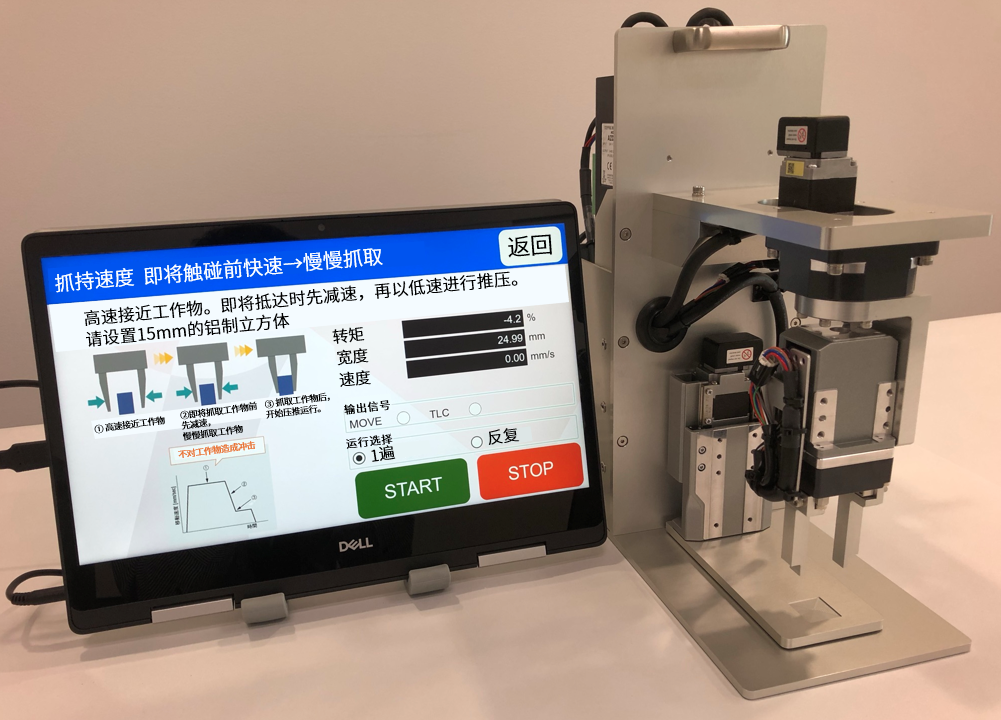
实机确认②:即将触碰铝制立方体前的快速→缓慢抓取
抓持对象:为方便观测速度变化,准备了15mm宽的铝制立方体。
动作模式为:
工作台上升→工作物抓持(高速→低速)→工作台下降→
→180度旋转→ -90度为单位旋转×2→工作台上升→
→放下工作物(低速→高速)→工作台下降
其中,180度旋转是为了能够展示稳固抓持时的状况。
然后,我们还进行了以下尝试。
工作台上升→工作物抓持(高速→低速)→工作台下降→
→180度旋转→ -90度为单位旋转×2→工作台上升→
→放下工作物(低速→高速)→工作台下降
其中,180度旋转是为了能够展示稳固抓持时的状况。
然后,我们还进行了以下尝试。
实机确认③:尝试以低转矩小心抓取鹌鹑蛋模型
抓持对象:鹌鹑蛋模型。虽是模型,但若大力抓取也会凹陷或者破碎。
运行电流下降到8%左右进行反复实验,实验发现,在10%左右正好可以稳妥抓持。
运行电流下降到8%左右进行反复实验,实验发现,在10%左右正好可以稳妥抓持。