








通过机器人控制器MRC01简单完成拱形运动
| ~ 细致的取放运行适合以节省设定时间、便捷的拱形运动来完成~ |
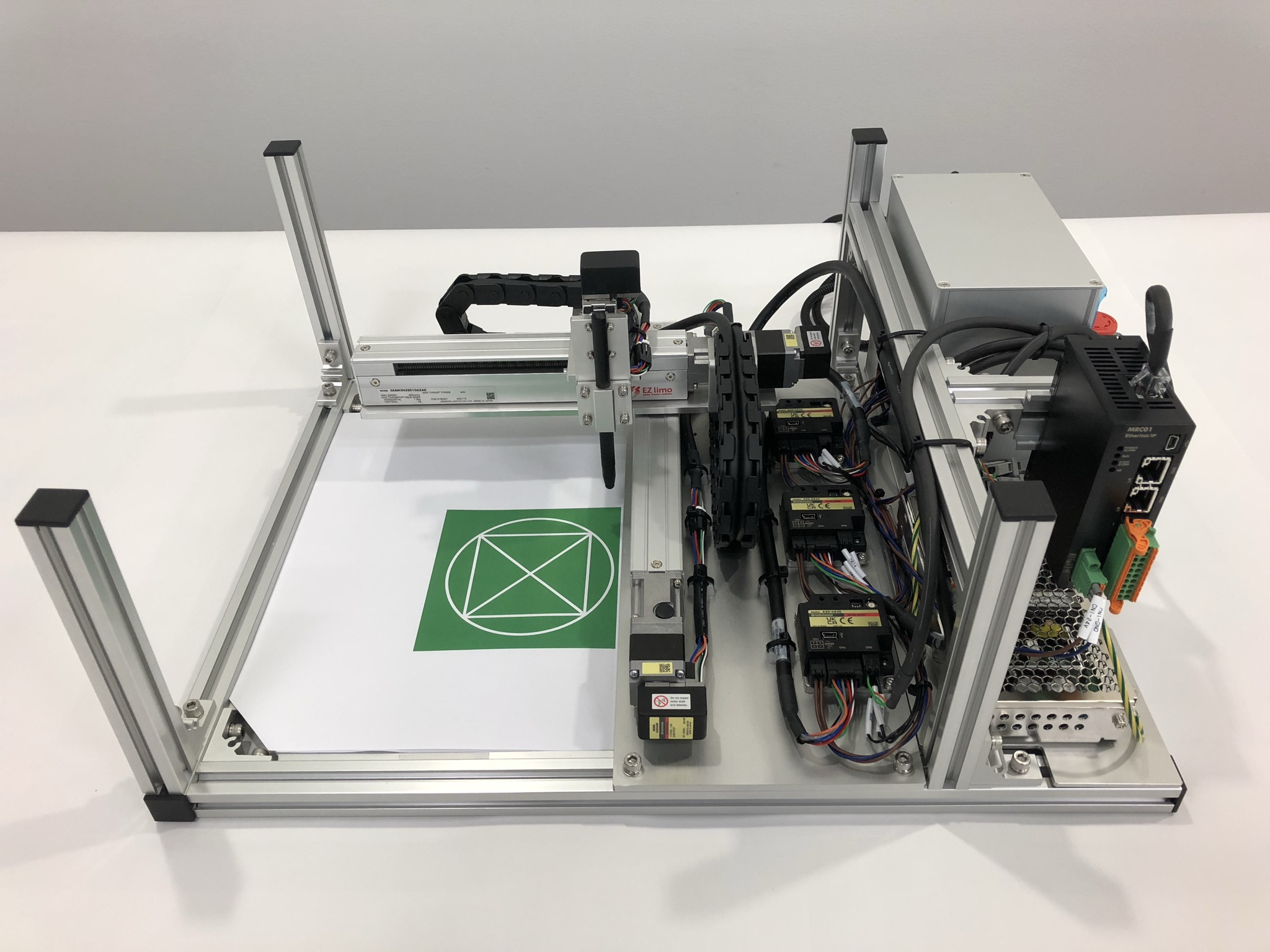
以直交机器人为原型制作了一个小型桌面样机。
由X-Y-Z 3轴构成。 从图片正面看,纵向的电动滑台为X轴,横向的电动滑台为Y轴。
样机尺寸大约为:深 400mm ×宽 500mm ×高 270mm。
控制方面,使用机器人控制器MRC01与编程软件MRC Studio。
各轴间以RS-485通信的Modbus(RTU)协议控制。MRC01可通过EtherNet/IP ™与上一级系统协作。
由X-Y-Z 3轴构成。 从图片正面看,纵向的电动滑台为X轴,横向的电动滑台为Y轴。
样机尺寸大约为:深 400mm ×宽 500mm ×高 270mm。
控制方面,使用机器人控制器MRC01与编程软件MRC Studio。
各轴间以RS-485通信的Modbus(RTU)协议控制。MRC01可通过EtherNet/IP ™与上一级系统协作。
系统构成
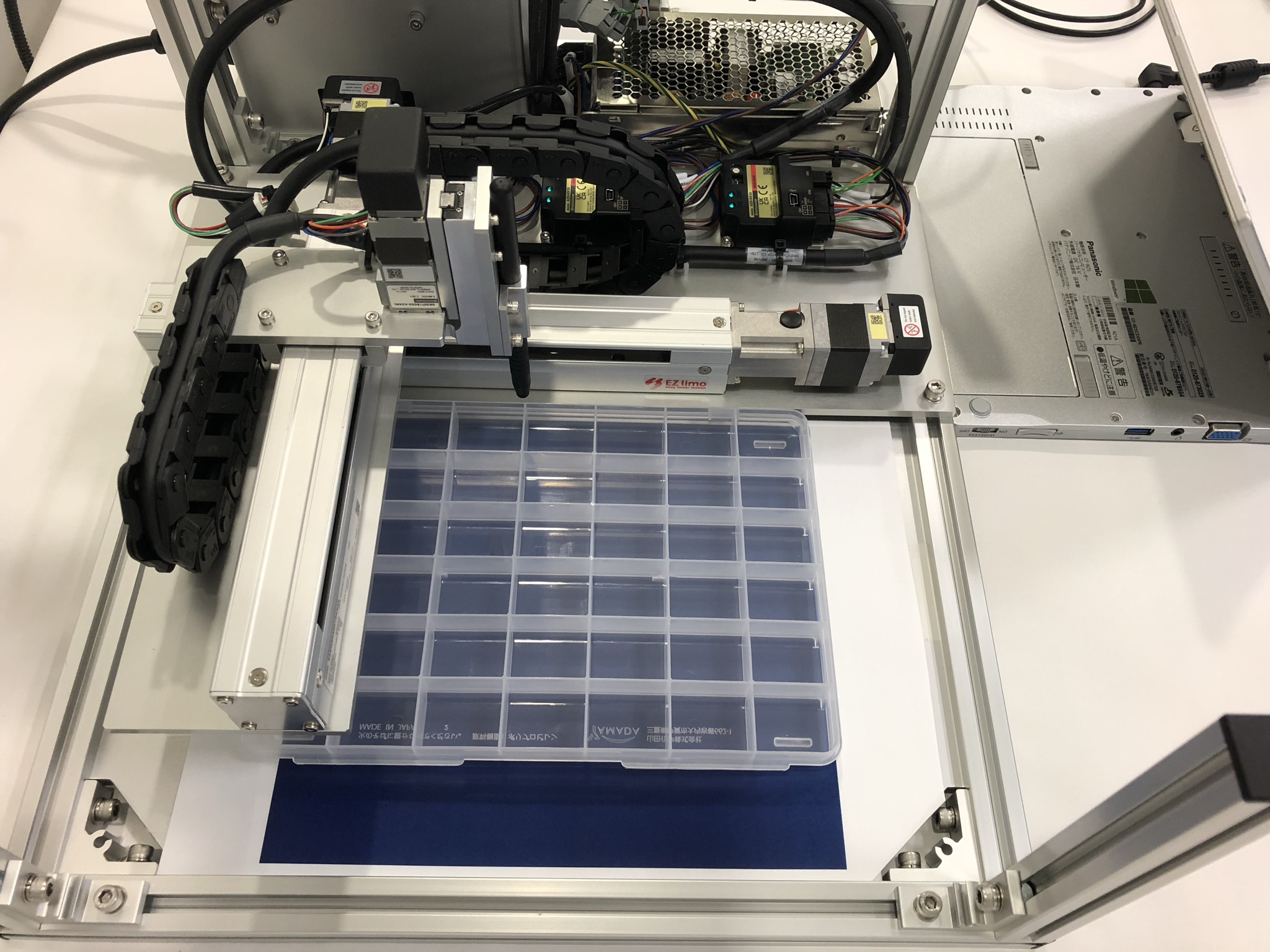
使用产品MRC01、EASM2XE015AZAK×2、 DR20T1BC02-AZAKL、AZD-KR2D×3 -------------------- 最大行程:X轴150mm、Y轴100mm、Z轴25mm。 导程:X轴和Y轴6mm、Z轴1mm。 速度上限:X轴和Y轴300mm/s、Z轴20mm/s。 电动机驱动器使用AZD-KR2D, 为AZ系列mini驱动器,体积小,因此可设置在电动机旁。 电动机与驱动器间最多可相隔10m进行设置,自由度高。 由于这台样机为Y轴单侧固定, 故Z轴仅可拿取大约一支笔的重量(100g左右)。 此次,在前端安装了触屏笔,并放置塑料格子, 以便清晰地观察拱形运动。
|
|
|
|
由上方观察,可看到运行动作是在描绘长方形。 由正面观察,横向以20mm/s的速度进行3次拱形运动、纵向为300mm/s的高速运行。 由于通过MRC Studio(▶点此进入下载页面)进行测试,故指令间会有些许延迟时间。 |
|
 |
可用于细致的取放、移载工作物动作。
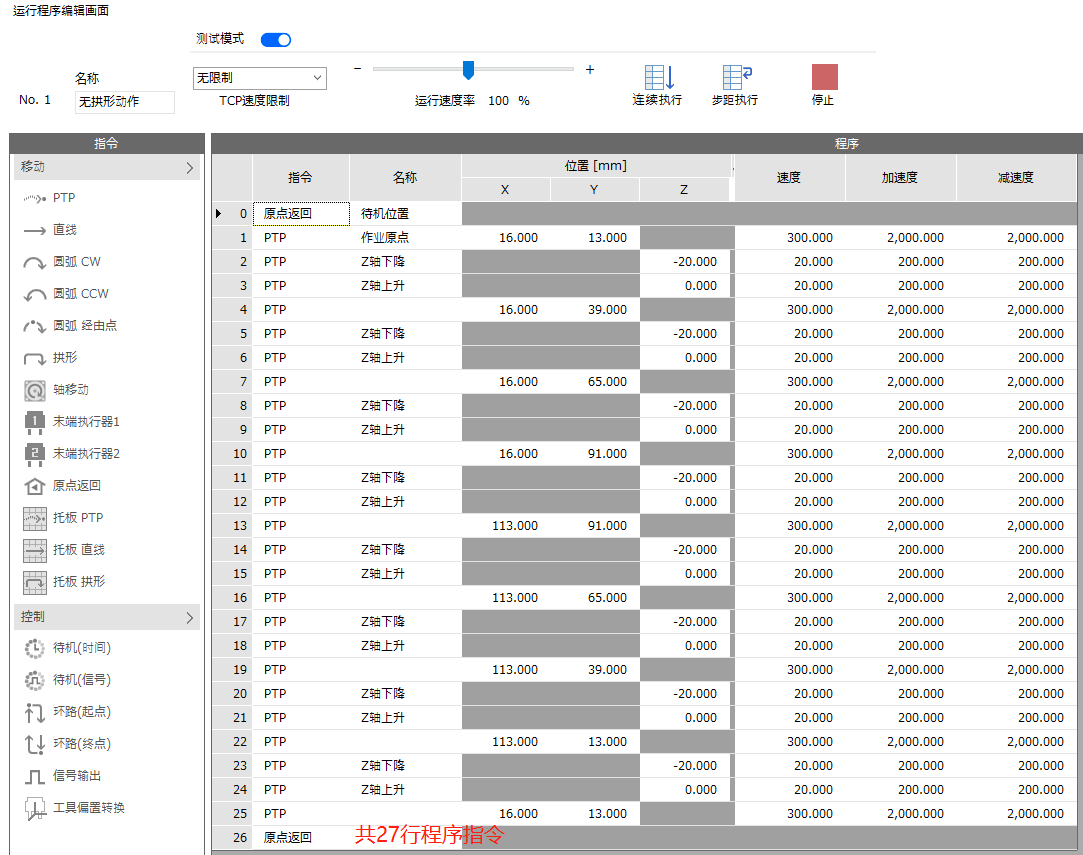
| 右图为这个动作程序的截图。 程序按图中从上至下的顺序连续执行。 视频中一连串的拱形运动,包含原点返回的程序行数 共15行,便于查看运行动作的顺序。
|
|
|

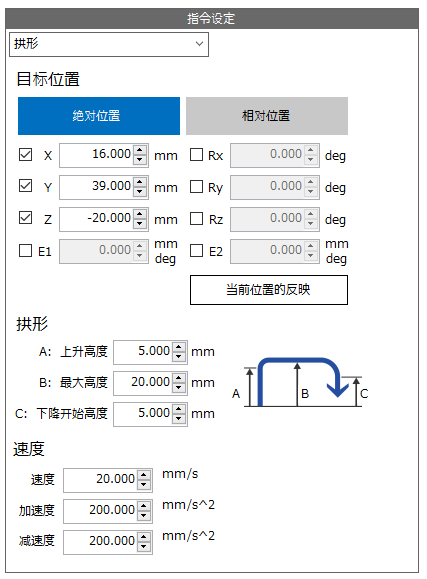
| 右图为这个程序第3行的拱形指令设定画面。 目标位置通过“绝对位置”设定,拱形运动速度配合Z轴的速度上限。 注意:提高拱形运动速度时,需配合最高速度较低的轴速度进行设定。
|
|
|
包含原点返回,程序行数共27行。 由于编写程序时将Z轴的上下驱动分开,故行数增多。
|
|
<
|
| 实验结论: 通过拱形指令的应用,简化程序的编写,减少了动作指令编程。 此次只是小型的桌面样机,虽然机构速度上有一定的限制, 但通过Z轴使用速度更高的传动装置,可实现拱形运动的高速化。 ※本实验涉及的数据及结果仅为样机测试值,并非产品规格值。 |
相关产品
| ▶机器人控制器MRC01 机器人控制器通过“初始设定”、“动作编程”、“动作确认”3 步,可轻松导入、控制自制机器人。可控制使用了混合控制系统αSTEP AZ系列/搭载AZ系列电动传动装置的自制机器人。 |
 |
| ▶AZ系列mini驱动器 比盒型驱动器更小。通过mini驱动器,实现装置的小型化、 节能化。 可对应电池驱动,可用于比以往更多的用途。 |
 |