








摆臂机构

|
如何提高半导体设备中摆臂机构性能, 实现准确滴胶? |
设备
摆臂机构存在的问题
在使用摆臂机构对半导体零部件如硅晶片等昂贵制品进行滴胶作业时,常会遇到定位不准,导致涂胶、化学液刻蚀不均匀,造成制品废品率较高的情况。| 1、精度不足 机构精度不足时,无法准确定位,偏离原定位置, 无法将化学试剂滴在指定位置。 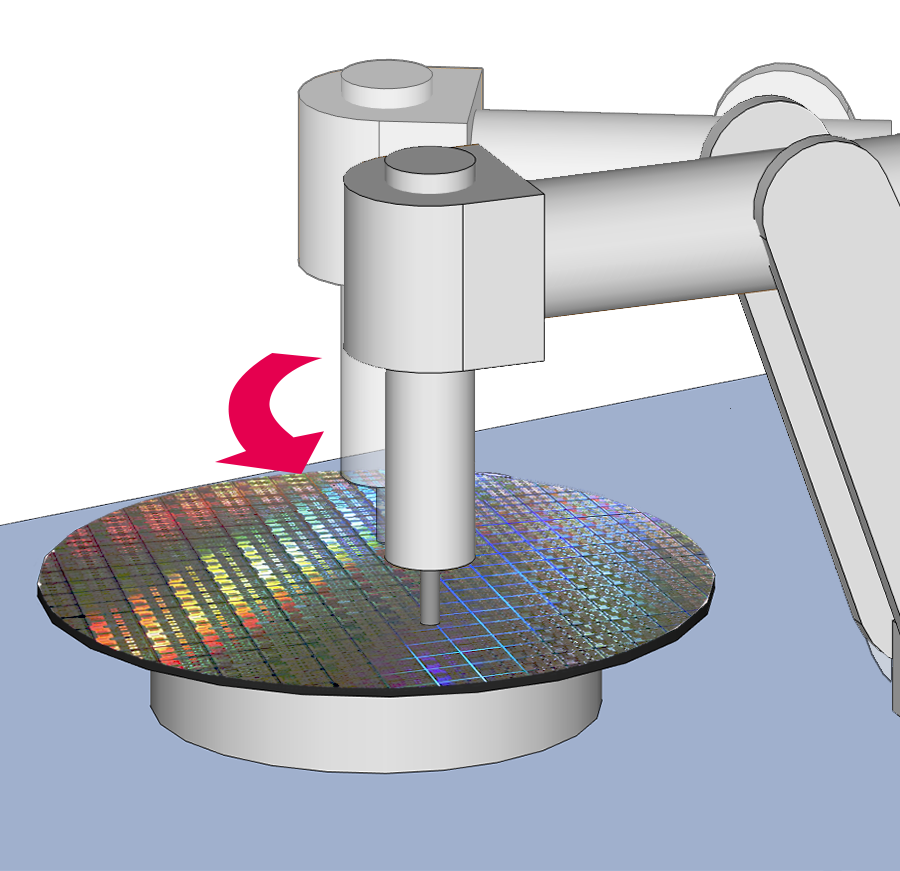
|
2.运行时振动影响 机构在运行时振动较大,导致胶液误滴, 影响均匀涂布/刻蚀。 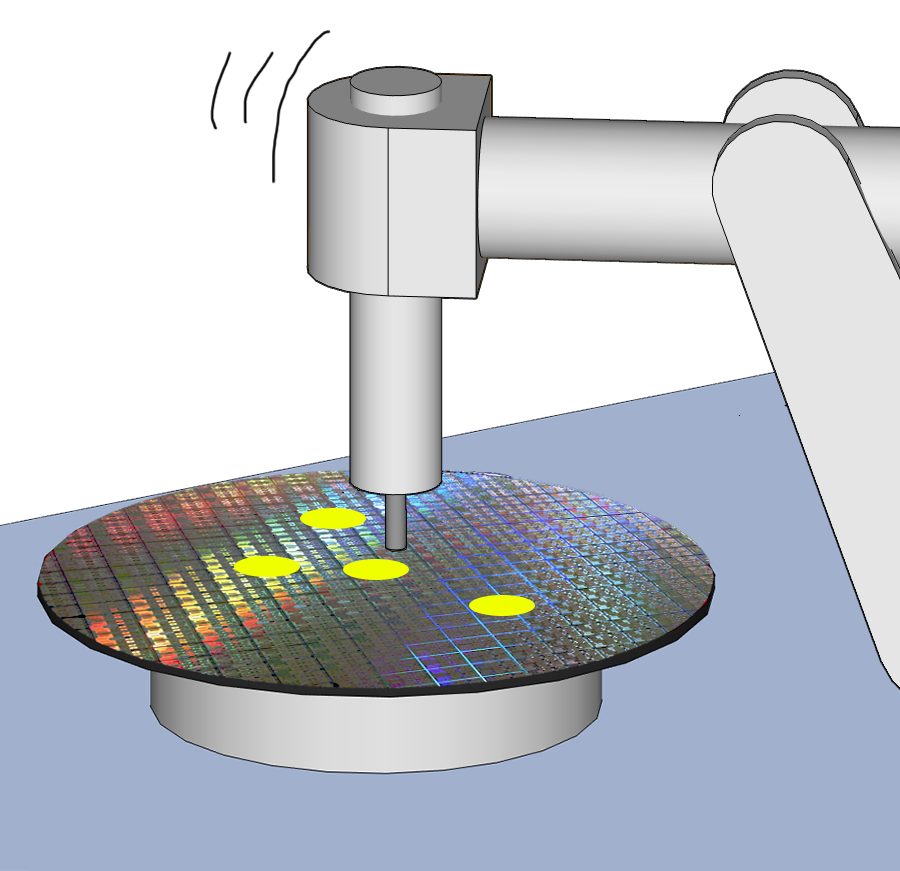 |

|
中空旋转式传动装置 DGⅡ系列 | 
|
通过改善机构以及电动机精度,提高整体精度,减少定位不准带来的影响。
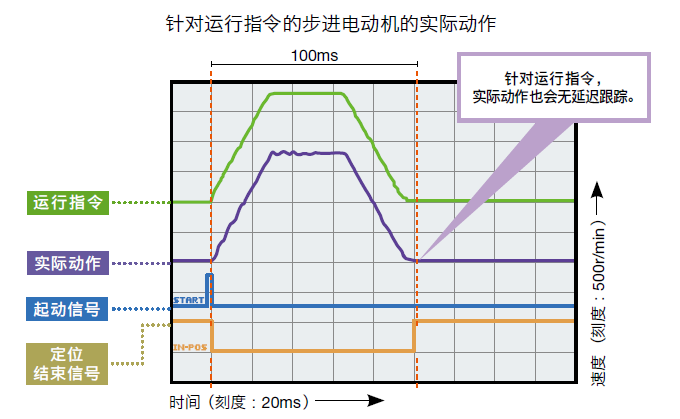
减少运行、停止时的微振
| DGII系列搭载了混合控制系统αstep AZ系列定位电动机。 AZ系列采取的独特控制方式兼具了开环控制和闭环控制的优点, 定位时无微振,通过电动机自身保持力停止。 且配备了微步驱动、平滑驱动功能, 能够抑制低速状态下的振动,实现平滑动作。 
|
精度更高
DGII系列实现了机构与步进电动机一体化,可将滴胶的摆臂机构直接安装在旋转平台上。相较于使用皮带轮等机构而言,可大幅提高精度。且DGⅡ系列无齿隙,反复定位精度可达±0.004°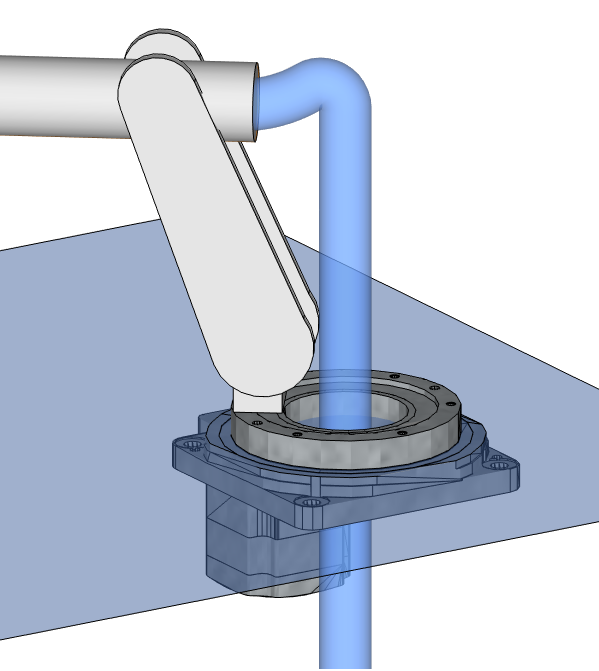
且AZ系列采用无需电池的绝对式系统,不需要原点传感器、限位传感器等外部传感器。能有效避免受外界影响导致的传感器误动作。
DGII系列用于此类摆臂机构还有什么优势?
除了能满足精度和振动需求之外,DGII系列还具有以下优势。
构造设计和配线更简洁
DGII系列的大口径中空孔构造,能够使胶管等贯穿,构造设计和配线都更加简洁。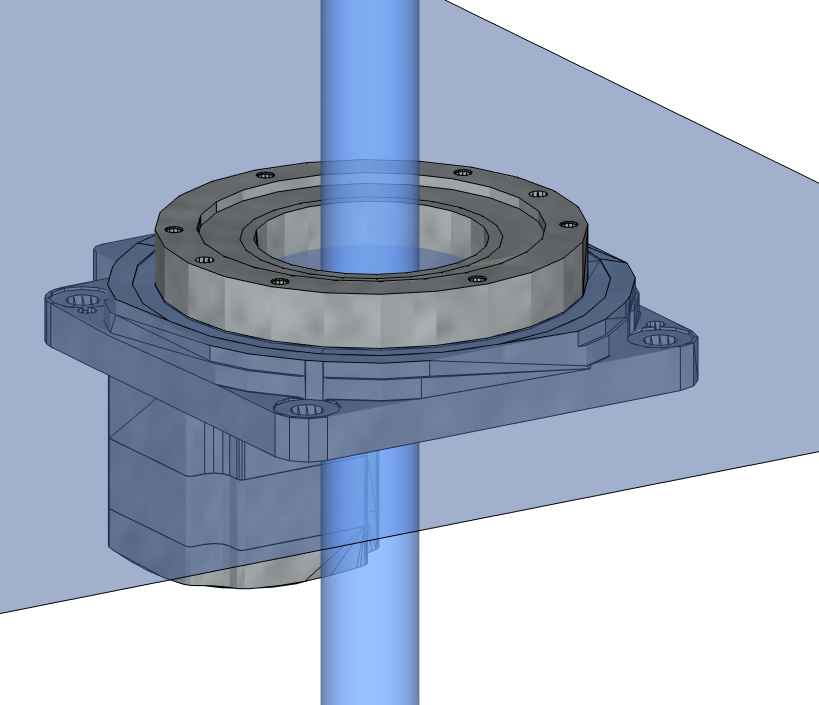
搭载的AZ系列电动机无需外部传感器和电池,且电动机机构一体化产品,可有效减少机构设计、零件调配、皮带状态调节等所需的时间及费用。
大惯量高负载,以小型机身输出高转矩,具备优越的加速性和响应性,加快工作节拍,提升加工效率。
相关产品
 |
|