控制器
机器人控制器
MRC01

机器人控制器通过“初始设定”、“动作编程”、“动作确认”3 步,可轻松导入、控制自制机器人。可控制使用了混合控制系统αSTEP AZ系列/搭载AZ系列电动传动装置的自制机器人。
特征
无PLC编程经验的机械设计人员也能简单操作
MRC01可以通过编程软件MRC Studio设定的动作程序,仅用电脑轻松进行示教、动作确认。

✽需要客户按照实际使用条件进行编程,本公司无法提供编程服务。
使用惯用的操作方法自动运行
MRC01即使是控制的初学者,也可简单通过开关的ON/OFF来直接控制运行。另外,可以和既有的PLC连接进行自动运行、也可通过连接对应EtherNet/IP™的PLC/IPC、触摸屏一边监控一边自动运行。
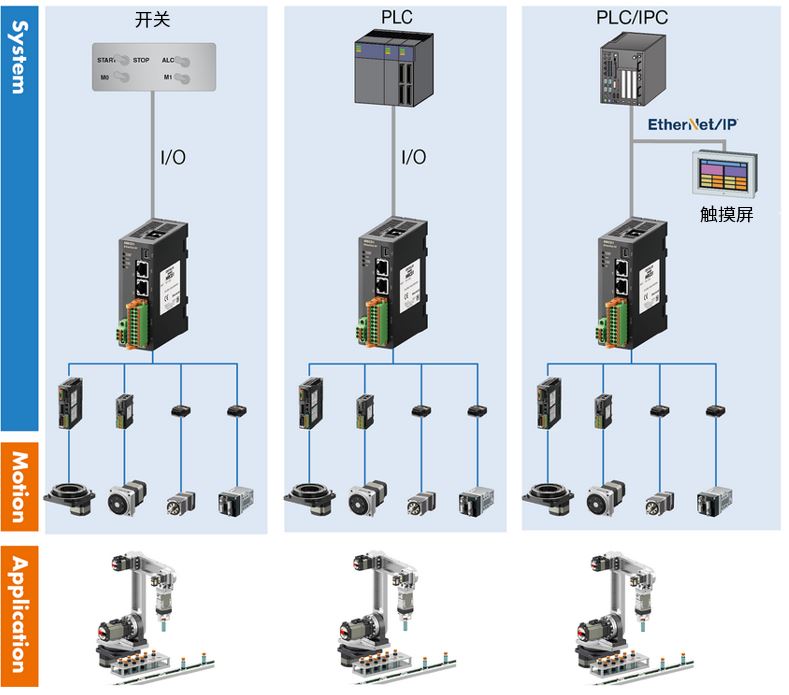
在现有系统中轻松导入自制机器人
通过EtherNet/IP™直接控制MRC01与上一级系统的协作。无需对现有设备的控制系统进行较大更改,即可轻松追加导入自制机器人。
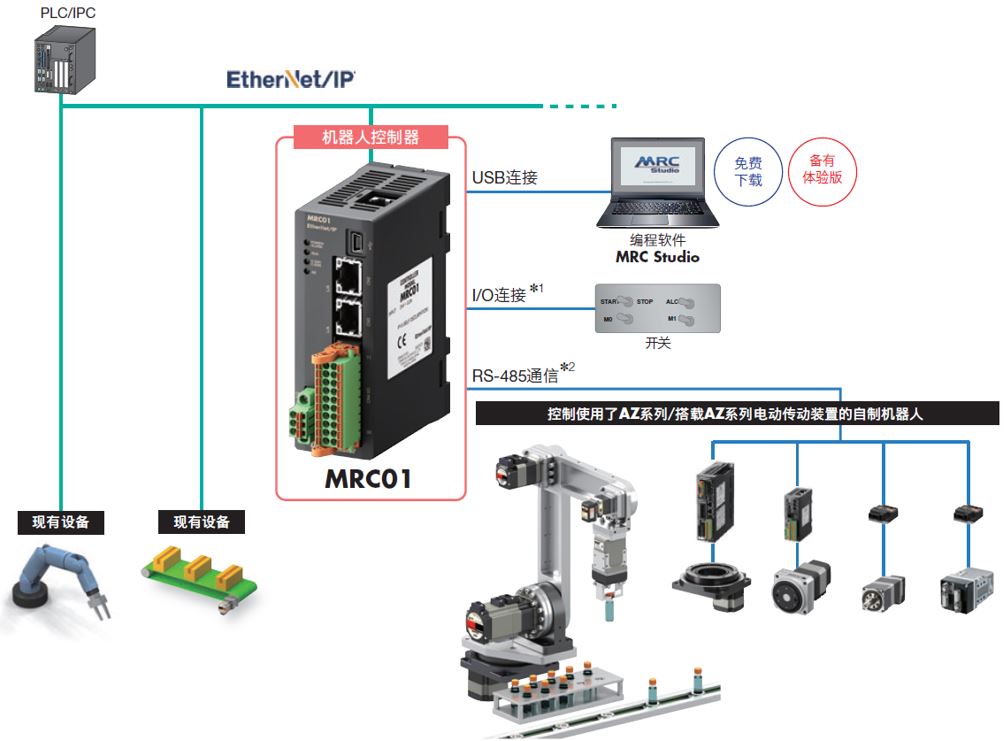
✽ 1 MRC01也可通过I/O连接(无上一级设备)运行。
✽ 2 MRC01和AZ系列的驱动器之间通过RS-485通信进行控制。
✽启动机器人前客户应负责事先对机器人实施充分的安全确认。对于机器人系统整体的安全性,本公司不承担任何责任。
即使第一次也能简单设置
| 备有从自制机器人的初期设定到动作编程都能简单进行设定的“编程软件MRC Studio” 另外,也备有用于在购买MRC01之前体验操作感的编程软件MRC studio Simulator。 ▶点此下载编程软件MRC Studio。
|
|
|
Step1. 按照指导说明,可简单地初始设定。
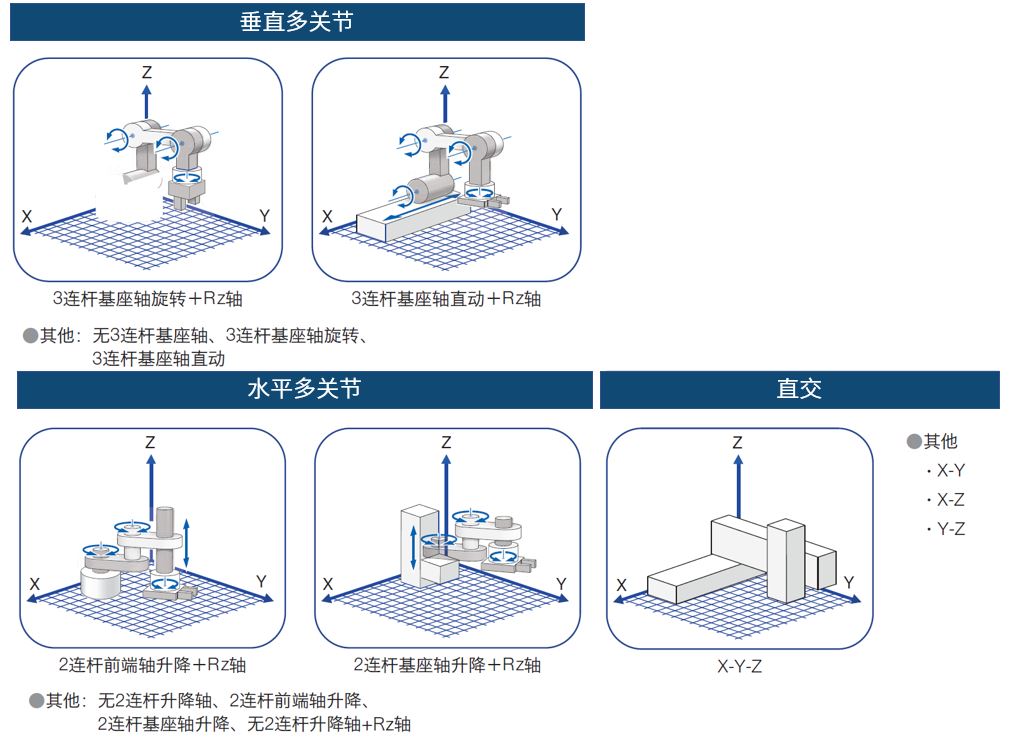
以向导形式进行机器人类型的选择和机构信息的输入等一系列初始设定。 通过边看图解边按照指导说明进行设定,即使是第一次,也能在短时间内完成机器人的初始设定。
| ■按步骤设定 根据向导菜单推荐机器人的初始设定。 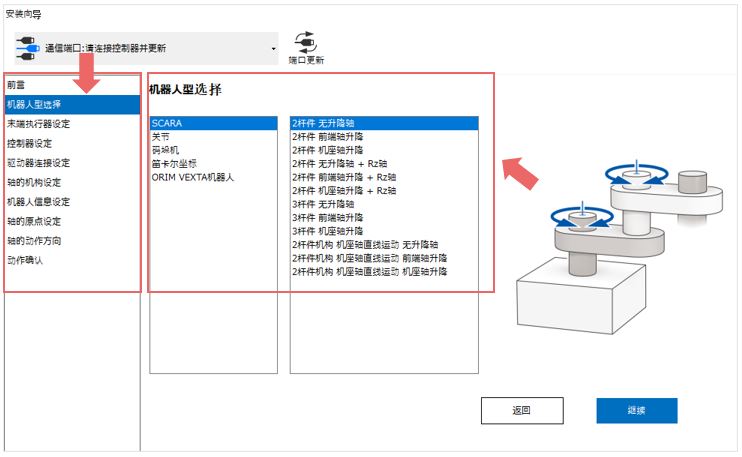 |
|
■边看机器人的图解边输入机械臂长度等尺寸 尺寸直接输入到图解内的输入栏中。 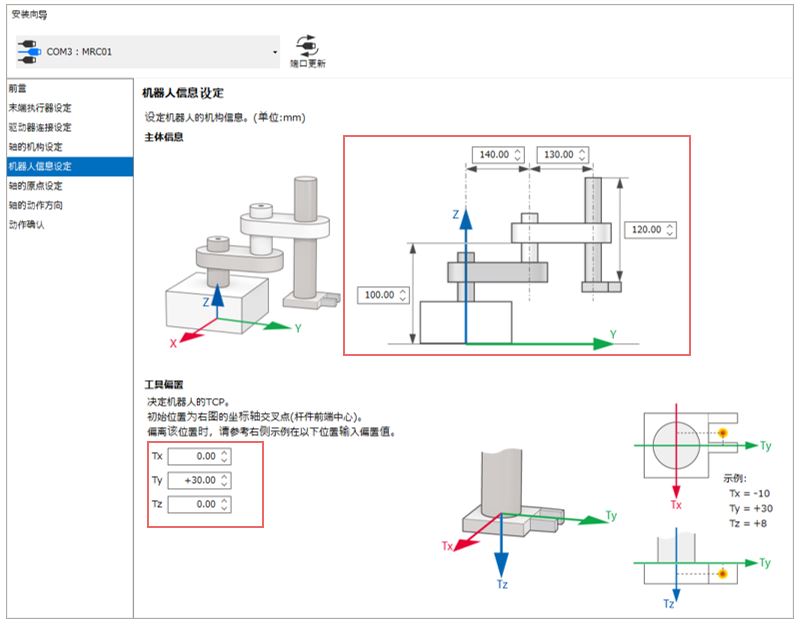
|
■自制机器人可以很简单
Step2. 不需要梯形图知识。通过项目选择,对动作进行编程。
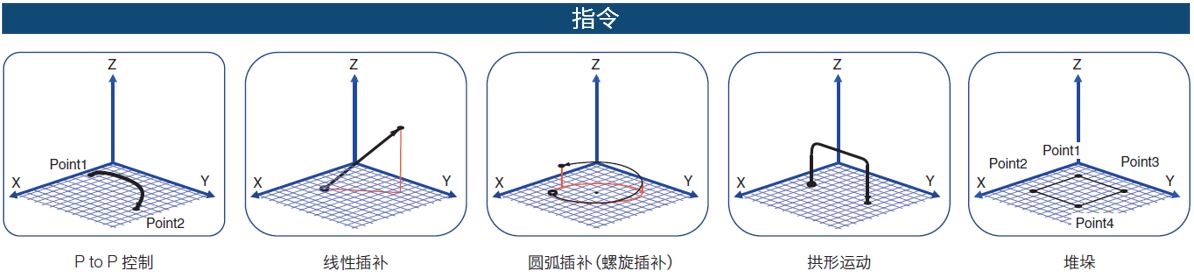
创建程序是选择指令的简单方法。无需梯形图等专业知识即可直观地创建程序。支持P to P运行、线性插补运行、圆弧插补运行、拱形运动等 。 此外,也可从上一级控制器经由EtherNet/IP直接执行运行数据。
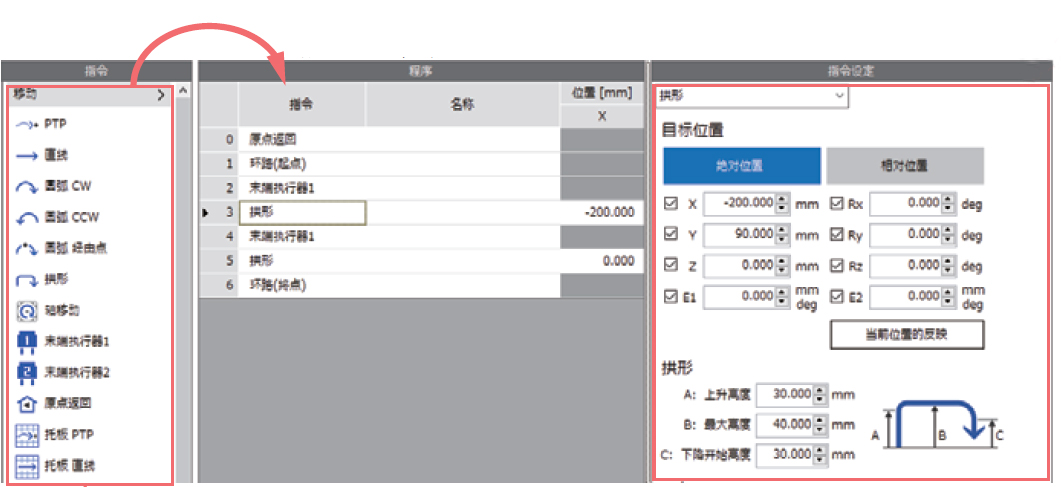
| ■拖放所需指令 从“指令”栏中选择必要的动作,拖放到“程序”栏中, 则显示“指令设定”栏。 |
|
■设定目标位置和速度 “指令设定”栏中输入目标位置的坐标·移动量、速度。
|
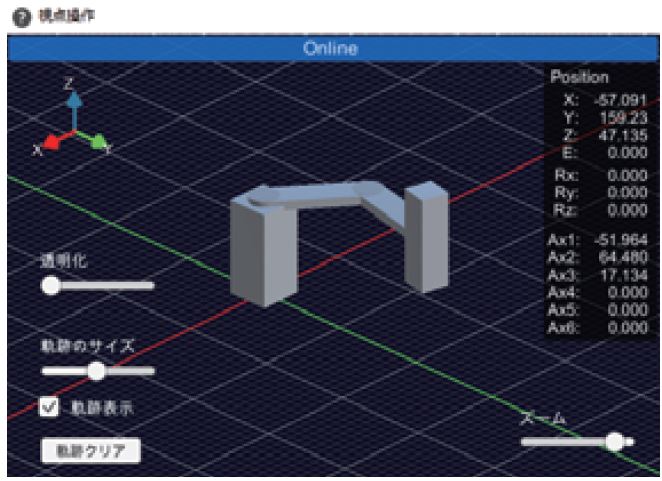
Step3.在线3D模拟中确认动作。
| 可在3D模拟器上确认机器人的工作程序。 运行实机前,可对程序进行简单的检查。 ✽ 不能在脱机时使用。 |
|
|
购买前可用来确认机器人动作的MRC Studio Simulator
|
|
为您准备了即使不与机器人控制器MRC01通信,也可对设想的实际动作进行预演的MRC Studio Simulator。 通过MRC studio Simulator制作的运行程序在实际导入机器人时也可直接使用。 |
|
|
|

MRC Studio (产品版)与MRC Studio Simulator的区别--------
两者都能免费下载。功能区别如下所示。
| 项目 | MRC Studio(产品版)(前往下载) |
MRC Studio Simulator(前往下载) |
| 与机器人控制器 MRC01通信 | ○ | - |
| 设置 | ○ | △ 无法设定与机器人控制器MRC01及驱动器的通信项目。 |
| 将设定数据文件保存到电脑 | ○ | ○ |
| 打开文件 | ○ 可打开 .mrcx 文件。 |
○ 可打开 .mrcxt 文件。 此外,为您准备了设定程序的样本。 |
| 导入在MRC
Studio Simulator 制作的数据文件 |
○※ | - |
| 示教 | ○ | ○ |
| 制作运行程序 | ○ | ○ |
| 测试运行 | ○ | ○ |
| 参数设定 | ○ | △ 有无法设定的参数。 详细请在MRC Studio Simulator的 “帮助”>“使用方法”中确认。 |
| 监控 | ○ | △ 可监控以下内容: ・机器人的TCP坐标 ・各轴的角度 ・左右手系 ・ 使用中的工具的偏距编号 ・使用中的坐标系的信息 ・托盘监控(托盘大小等信息、当前单元格的编号等) ・机器人信息监控(机器人的连杆长度等机构信息) ・无法监控与外部机器连接所需要的信号系信息。 |
首次实机运行时,建议先降低运行速率进行尝试。
对应产品
AZ系列及搭载了AZ系列的电动传动装置。产品种类丰富,机器人设计自由度高有助于配合自制机器人。
AZ系列内藏定位型驱动器
AZ系列mini驱动器RS-485通信型