








电动传动装置
电动夹爪
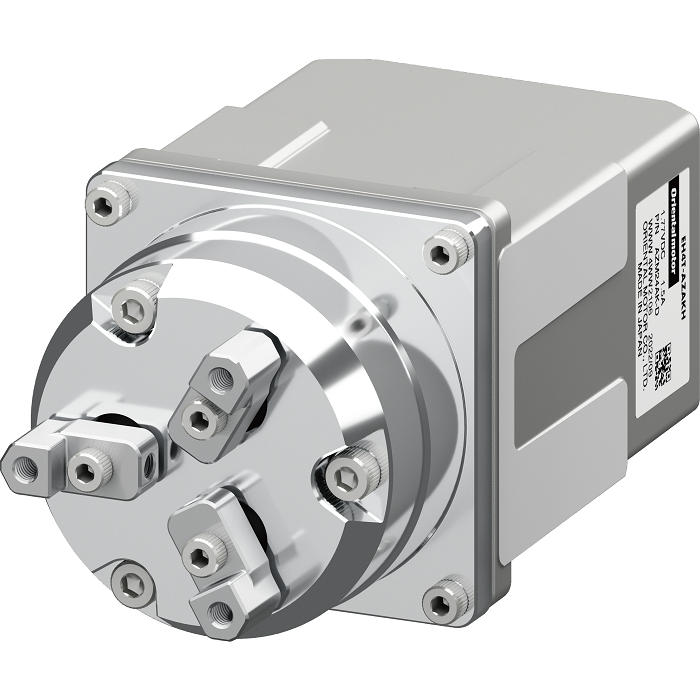
EH系列(搭载αSTEP AZ)

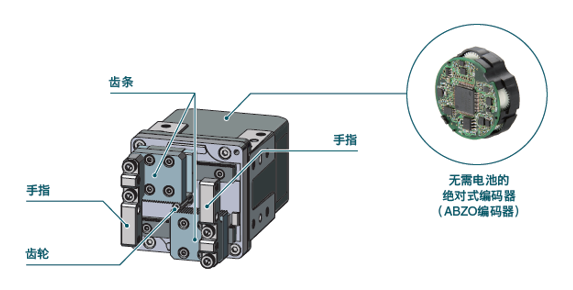
齿条·齿轮机构与AZ系列组合成了电动夹爪EH系列。
实现如同人指般的精细“抓取”,帮助实现自动化、节省人力。
αSTEP AZ系列作为驱动电动机
|
●内置无需电池的绝对式编码器,无需外部传感器
随时监控电动机位置信息
|
|
●2爪型与3爪型的比较
类型
|
2爪※1
|
3爪
|
||
|---|---|---|---|---|
适合抓持的
工作物形状
|
矩形
 |
圆柱体、复杂形状、球体
|
||
可动范围
|
 |
 |
|
 |
| 开时: P.C.D.Φ30.9mm |
|
闭时:
P.C.D.Φ7mm |
||
 |
 |
|||
张开幅度:
P.C.D.Φ23.9mm |
||||
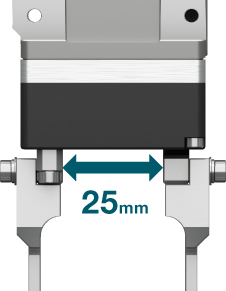
最大抓持力[N]
|
25
|
50
|
||
容许负载[N]
(容许轴向负载[N]※2) |
5
|
15
|
||
质量[kg]
|
0.38
|
0.38(带安装护盖)
0.28(无安装护盖) |
||
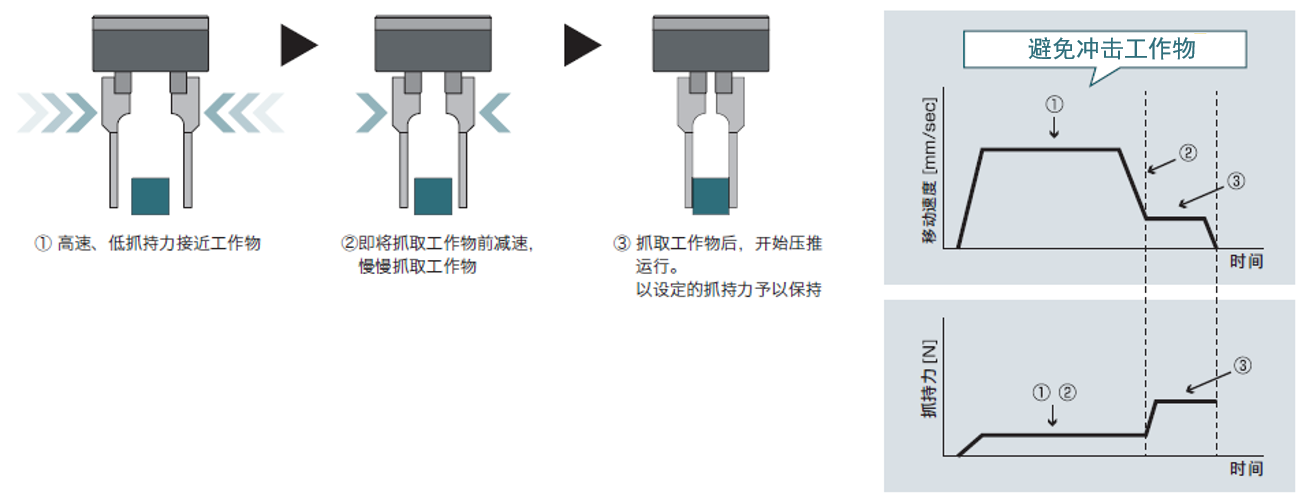
1、抓取:稳妥抓取易变形工作物、易受损工作物。(2爪·3爪)
可根据抓取的对象,自由设定抓持力、抓取时间、速度。易受损的玻璃、易变形的树脂及弹簧等同样也能安全、稳妥地抓取。
●即将触碰前快速→慢慢抓取
高速接近工作物。即将触碰前减速,可通过低速压推。
|
●可抓取易变形、易受损工作物
|
●3爪型可抓取球形的柔软海绵、圆形易变形的镜片、圆柱形的玻璃瓶等工作物。 |
2、对齐:可对准工作物的朝向及位置。(2爪·3爪)
手指的最小移动量为0.02mm,所以可根据工作物大小进行抓取、对齐朝向及位置。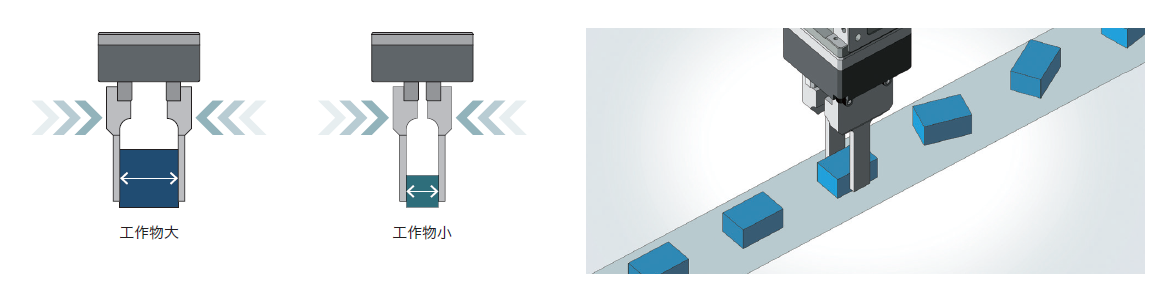
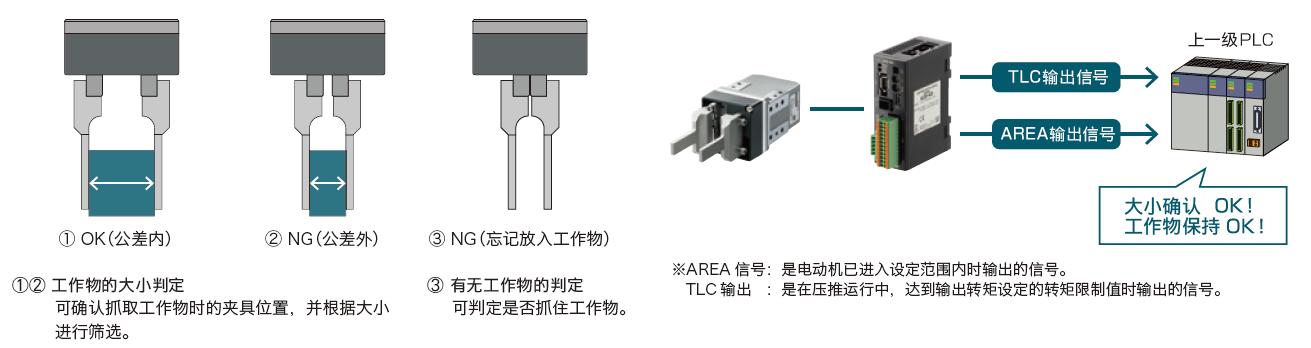
3、测量:即使没有外部传感器,也能够确认工作物的大小。(2爪)
●在手指的动作范围内,进行工作物大小及有无工作物的判定可利用来自驱动器的输出信号(TLC输出、AREA输出)确认手指动作范围,
进行工作物大小及有无工作物的判定。
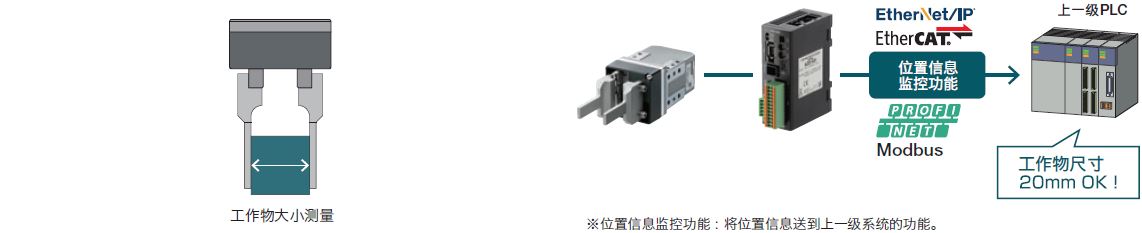
●监控来自夹爪的位置信息,进行大小测量
利用驱动器的坐标信息监控功能,将来自电动夹爪的坐标信息读取到上一级PLC中,
从而测量工作物大小。
*请另行准备夹具(挂钩)
用途例
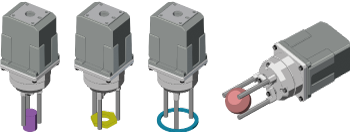
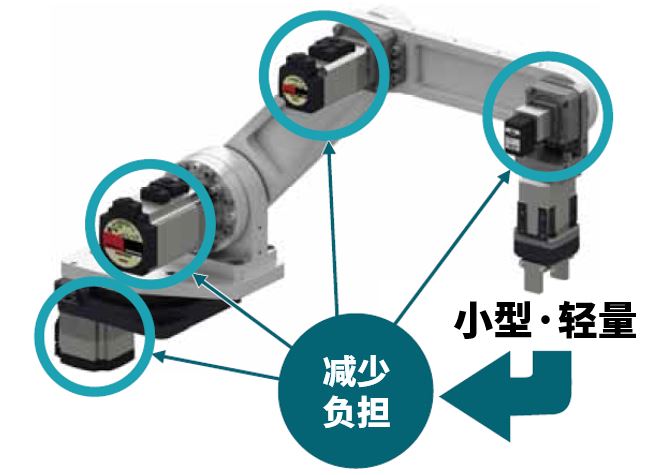
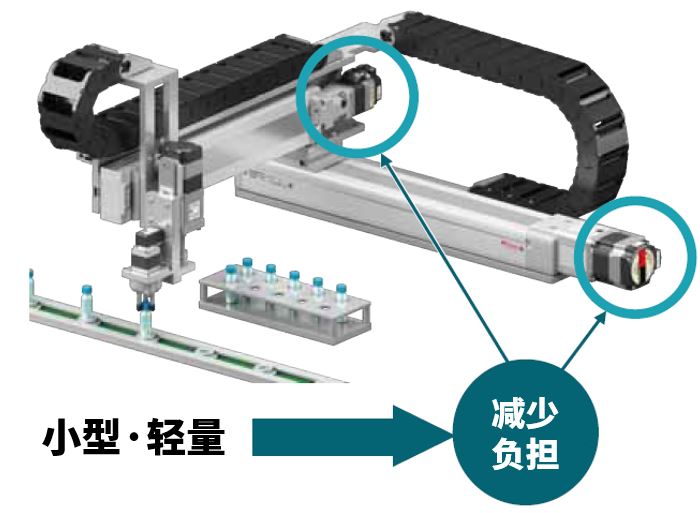
●减轻各关节负担,有助于机器人整体的小型化、节省成本末端执行器越是小型·轻量,越能减轻各关节的负担,从而有助于机器人整体的小型化、节省成本。
| EH3-AZAKH | EH4-AZAKH | EH4T-AZAKH |
|---|---|---|
 |
 |
 |
| W42.5mm×D80.5mm×H36mm | W48.5mm×D91mm×H46mm | W48.5mm×D98mm×H46mm |
| 质量 : 200g | 质量 : 380g | 质量 : 380g |
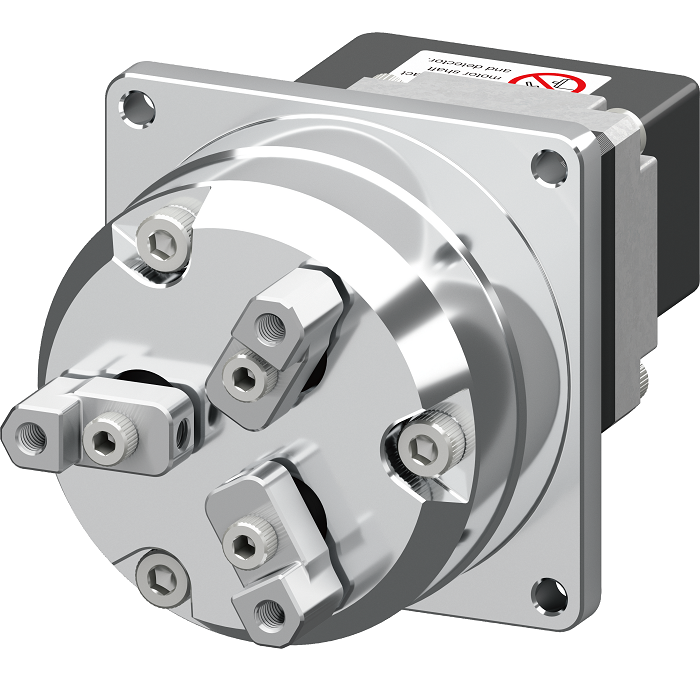
●无安装护盖,有助于提高设计自由度、实现轻量化
备有可灵活对应客户设计的直交轴机器人末端等安装的法兰盘。
|
|
|
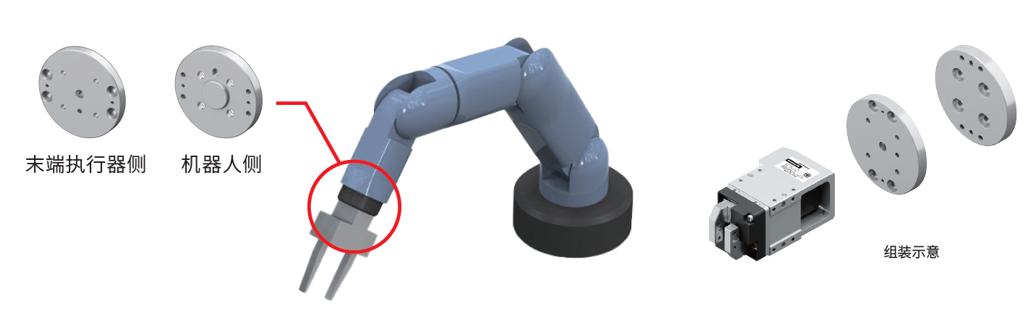
备有机器人用安装法兰盘
EH系列备有用于在工业机器人上安装末端执行器设备的法兰盘。有助于治具的设计及减少制作工时。而且,机器人侧的法兰盘形状符合ISO9409-1(JIS B 8436)标准。
可安装于各机器人制造商的SCARA 机器人及垂直多关节机器人上。▶点此查看详细介绍
※如需购买还请联络客户咨询中心或距离您最近的销售点(▶点此查看各销售点联络方式)
其他相关内容
 |