








真机实例集----SCARA机器人(水平多关节机器人)
装置概要
使工作物的取放及工程间搬送自动化的自制SCARA机器人。运用于将以往需要人手工进行的连结、计测、组装自动化的产线中。
在有限的空间中实现取放及工程间搬送。
机器人控制器 MRC01
在现有系统中轻松导入自制机器人
通过EtherNet/IP™直接控制MRC01与上一级系统的协作。无需对现有设备的控制系统进行较大更改,即可轻松追加导入自制机器人。
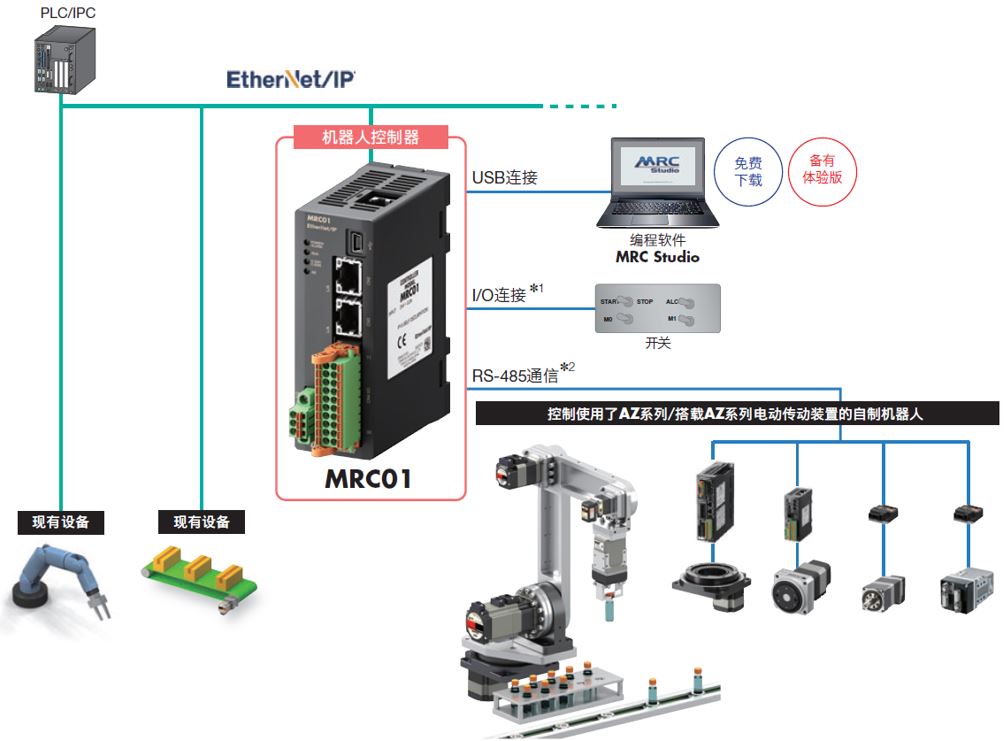 ✽ 1 MRC01也可通过I/O连接(无上一级设备)运行。
✽ 1 MRC01也可通过I/O连接(无上一级设备)运行。✽ 2 MRC01和AZ系列的驱动器之间通过RS-485通信进行控制。
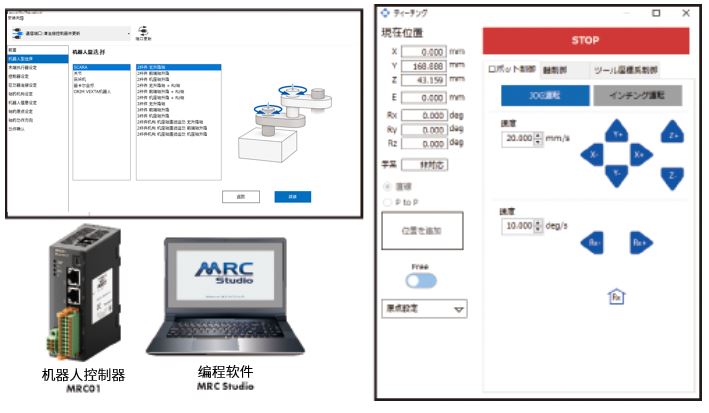
即使是第一次使用也能简单设置
MRC01即使没有编程语言等专业知识,从初始设定到运行编程也可简单设定。以向导形式轻松进行机器人类型的选择和机构信息的输入等一系列初始设定。也可边通过示教操作运行自制机器人,边在运行程序中追加目标指令。由于可通过1个指令完成复杂的设定所以即使新手设备设计者初次使用也能在较短的时间完成编程。
●编程软件 MRC Studio、EDS文件可从官方网站下载。
|
|
●视频介绍
|
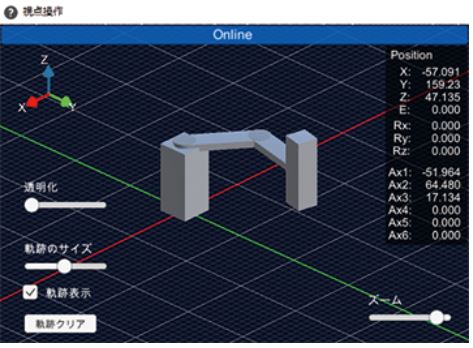
在线3D模拟中确认动作
|
可在3D模拟器上确认机器人的工作程序。 |
 |
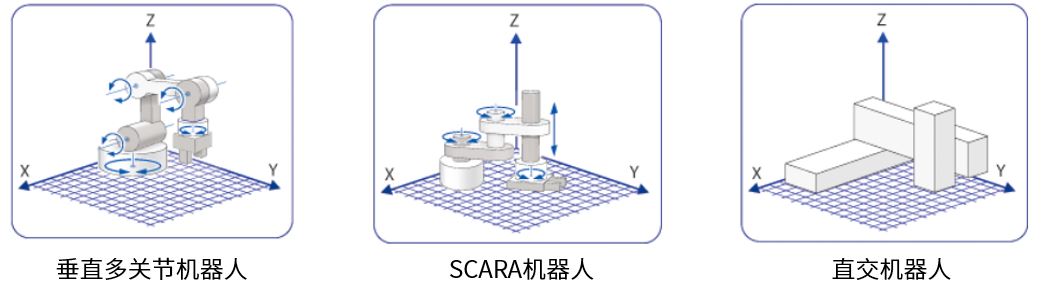
可控制末端执行器轴
可对应工业用机器人中具有代表性的:垂直多关节机器人、SCARA机器人、直交机器人。
末端执行器轴也可通过MRC01控制,有助于系统整体的省空间、省配线及省成本。
可对应丰富的产品
 |
|
|
|
AZ系列内藏定位型驱动器
AZ系列mini驱动器RS-485通信型
|
