








真机实例集----SCARA机器人(水平多关节机器人)
装置概要
使工作物的取放及工程间搬送自动化的自制SCARA机器人。运用于将以往需要人手工进行的连结、计测、组装自动化的产线中。
在有限的空间中实现取放及工程间搬送。
搭载αSTEP AZ系列的产品
机械式多回转绝对式编码器,实现无需电池及外部传感器
αSTEP AZ系列无需原点传感器等外部传感器,有助于节省配线及小型化。采用机械式多回转的绝对式编码器:ABZO编码器,即使定位运行中电源因非正常停止或停电而被切断,也能保持位置信息。位置信息由ABZO编码器以机械方式管理,因此无需电池。也就无需考虑购买电池的成本、运行时电池相关的问题及更换电池的时间。而且,AZ系列的电动机自身可代替传感器、数值化监控机器人状态。
适用于关节轴 中空旋转式传动装置和小型减速机型
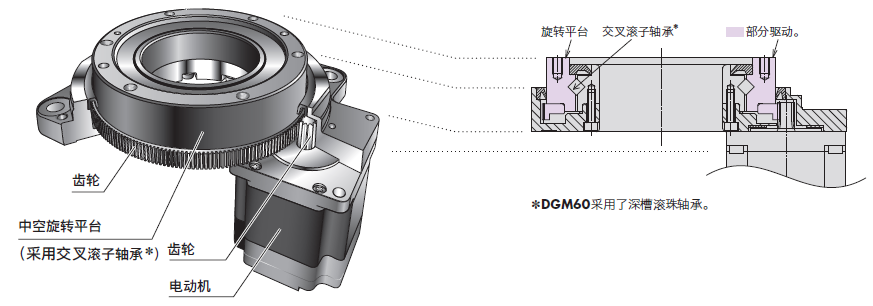
●中空旋转式传动装置DGⅡ系列(轴1、轴2)SCARA机器人在抓取离开轴1较远的机械臂前端的工作物时,会产生大负载转矩。
DGⅡ系列高刚性的交叉滚子轴承与中空旋转平台一体化,实现高容许转矩。因此有助于扩大机械臂的可动范围。
而且,大口径中空孔(贯穿)可用于布线复杂的配线与配管等场合,使装置设计更为简洁。
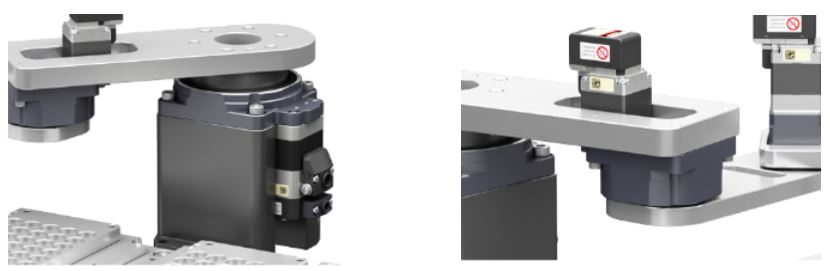
●αSTEP AZ系列 HPG减速机型(轴3)
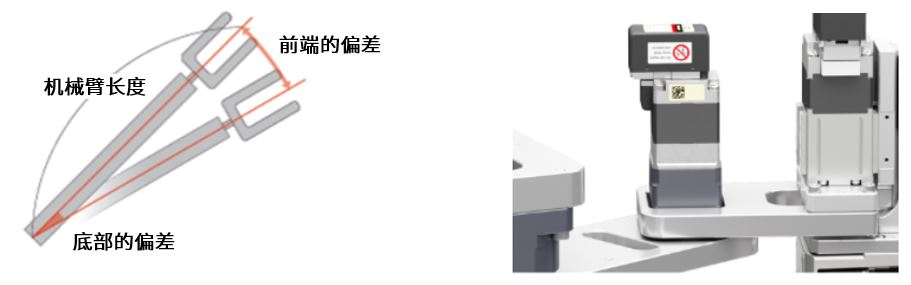
即便是细小偏差在机械臂的前端也会变大,有可能导致无法正确抓取工作物。
HPG减速机型无齿隙,可抑制偏差,准确完成动作。
即便是细小偏差在机械臂的前端也会变大,有可能导致无法正确抓取工作物。
HPG减速机型无齿隙,可抑制偏差,准确完成动作。
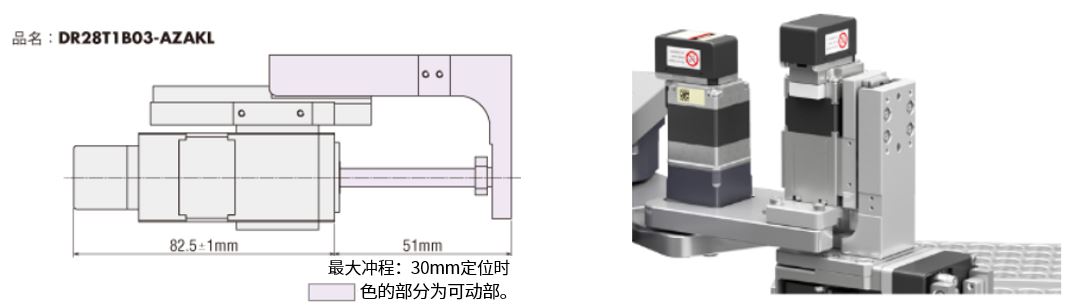
降低机器人前端的负担的小型·轻量传动装置
●小型电动缸 DR系列(轴4)αSTEP AZ系列与滚珠螺杆一体化的小型化机身,有助于装置的小型化·省空间化。通过装置前端的轻量化,提升设计自由度。
●电动夹爪 EH系列(轴5)
末端执行器小型·轻量可减轻各关节的负担,有助于机器人整体的小型化、降低成本。
电动夹爪可自由设定位置·抓持时间·抓持力。可实现各种各样的抓持动作。

注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
末端执行器小型·轻量可减轻各关节的负担,有助于机器人整体的小型化、降低成本。
电动夹爪可自由设定位置·抓持时间·抓持力。可实现各种各样的抓持动作。
相关产品

|
|
|
|

|
|

|
|
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
