








晶圆Pin针顶升机构的设计提案
装置概要
随着半导体工艺发展,对设备的要求也越来越高,对每个轴的动作也愈发严格。小型化、高效率、高精度、低振动……众多需求在机构上的设计应用,以下将为您介绍各类提案:
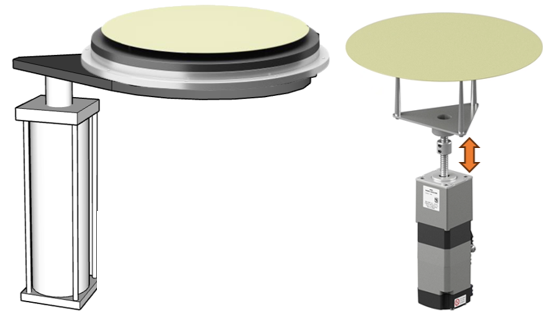 *图示仅供参考,需外置导轨设计
|
|
实现的动作: 将吸附于平台上的晶圆片通过Pin针顶起,以便于利用搬运机械手进行取、送晶圆片。
※顶起前,晶圆通过“静电吸附”、“真空吸附”等方式,附着在平台上。
• 需要顶起多片晶圆,实现大负载。
• 顶升机构希望实现小型化。
• 提升效率,提高产能。
机构痛点·难题
• 静电吸附型平台,用气缸顶升PIN针,可能出现“裂片”。• 需要顶起多片晶圆,实现大负载。
• 顶升机构希望实现小型化。
• 提升效率,提高产能。
课题:传感器异常、误动作等所引起设备报错
普通气缸、增量式AC伺服电动机等应用,需要利用传感器实现限位、原点等功能。
且传感器接线麻烦,存在因传感器本身或其配线破损、异常等导致设备故障停机的风险,影响生产。
解决方案: AZ系列步进伺服混合控制系统步进电动机(ABZO编码器)
●无需电池的绝对定位视频演示
普通气缸、增量式AC伺服电动机等应用,需要利用传感器实现限位、原点等功能。
且传感器接线麻烦,存在因传感器本身或其配线破损、异常等导致设备故障停机的风险,影响生产。
解决方案: AZ系列步进伺服混合控制系统步进电动机(ABZO编码器)
支持绝对定位及缩短多轴的原点返回时间
|
●搭载机械式绝对编码器(ABZO编码器) 无需传感器、电池的设计,有助于实现小型化构造。 ●位置保持和高速原点返回 定位运行中,即使电源非正常停止或发生停电,也能保持位置信息。而且,即使需要回原点也无需使用外部传感器,因此可实现高速原点返回。
|
 |
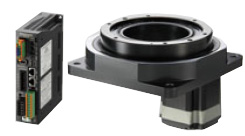
●搭载AZ系列的电动传动装置:
 |
 |
 |
 |
 |
 |
| 电动滑台 ▶EZS系列 ▶EAS系列 |
▶电动缸 EAC系列 |
小型电动缸 ▶DR系列 ▶DRS2系列 |
▶中空旋转式 传动装置 DGII系列 |
齿轮·齿条系统 ▶L系列 ▶LJ直线减速机 |
▶电动夹爪 EH系列 |
●无需电池的绝对定位视频演示
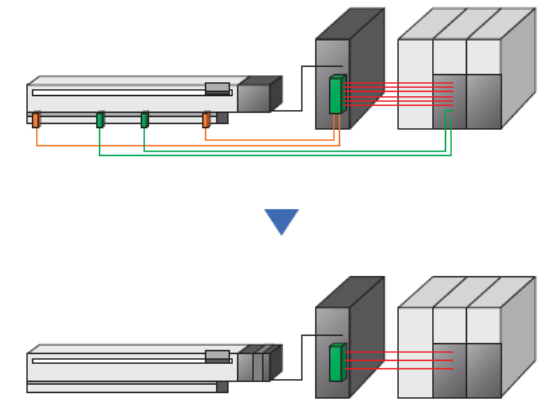
无需外部传感器,减少了相关问题发生
AZ系列搭载机械式绝对编码器(ABZO编码器)实时管理位置信息,可省去原点返回所需的外部传感器。
|
 |
搭载产品

注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。