








减速机
| ▶AC电动机用减速机 |
▶无刷电动机用减速机 |
| ▶步进电动机、伺服电动机用减速机 |
▶减速机的作用 |
| ▶最大转矩的应用 |
|
|
|
步进电动机、伺服电动机用减速机 |
一般如果安装尺寸相同,步进电动机的输出转矩较AC电动机大,又由于伺服电动机高速旋转,因此必须以高转矩、高转速对应,以免破坏电动机的这些特性。
以下为较具代表的控制电动机用减速机的原理构造。
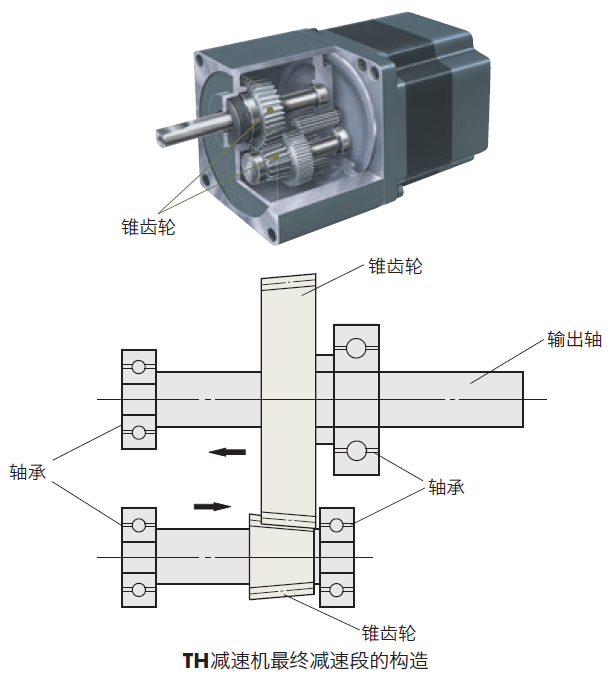
TH减速机
◇ 原理与构造
TH减速机型的直齿轮减速机的输出段以及与其啮合的齿轮部分皆采用锥齿轮(Taper Gear )。锥齿轮朝轴向连续变位。微调这些锥齿轮,朝箭头方向调节其啮合量,以达到降低其齿隙的目的。
TH减速机型的直齿轮减速机的输出段以及与其啮合的齿轮部分皆采用锥齿轮(Taper Gear )。锥齿轮朝轴向连续变位。微调这些锥齿轮,朝箭头方向调节其啮合量,以达到降低其齿隙的目的。
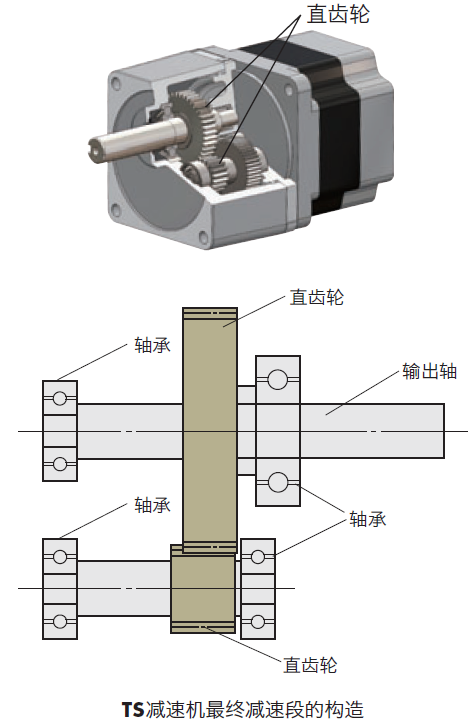
TS减速机
◇ 原理与构造
TS减速机通过齿轮加工的高精度化及将热处理后的尺寸变化量考虑进去的齿轮加工的实施,减少对齿隙的影响。此外,关于输出轴齿轮,热处理后实施高精度加工,去除因热处理导致尺寸变化的影响。因此,TS减速机实现了无需特别调整机构的简单构造。
TS减速机通过齿轮加工的高精度化及将热处理后的尺寸变化量考虑进去的齿轮加工的实施,减少对齿隙的影响。此外,关于输出轴齿轮,热处理后实施高精度加工,去除因热处理导致尺寸变化的影响。因此,TS减速机实现了无需特别调整机构的简单构造。
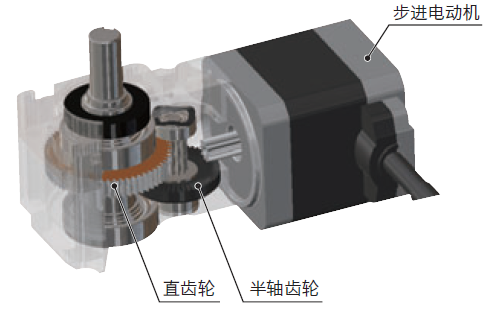
FC减速机
◇ 原理与构造
FC减速机是指由半轴齿轮(圆盘状的齿轮)与直齿轮构成的直交轴减速机。借助本公司的高精度加工,对半轴齿轮的小型化和高强度化取得成功,实现了可抑制齿隙的小型直交轴。
PS减速机
◇ 原理与构造PS减速机为行星齿轮机构的减速机。由太阳齿轮、行星齿轮、内齿轮等3个机构所构成。安装于中心轴位置的太阳齿轮(一段型减速机时此部分为电动机转轴。)外侧有数个行星齿轮,利用内齿轮沿中心轴圆周做公转。通过行星齿轮的公转利用行星轮架转换成输出轴的旋转。
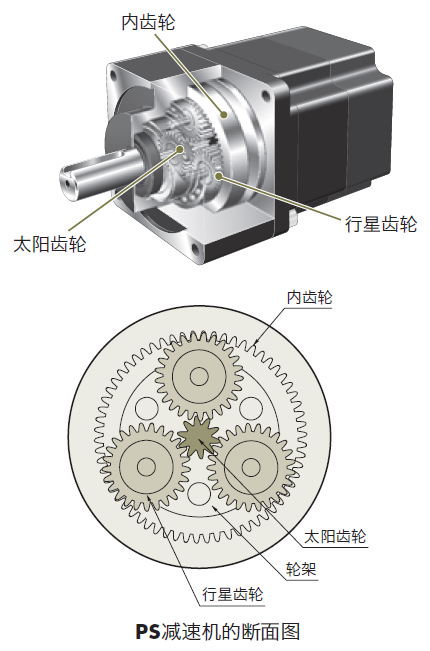
行星齿轮:为多个外齿轮,以太阳齿轮为中心公转。
各行星齿轮都被安装于行星轮架上,行星轮架上固定有减速机输出轴。
内齿轮 :为固定于减速机外壳上的圆筒状的齿轮,内侧有小齿。
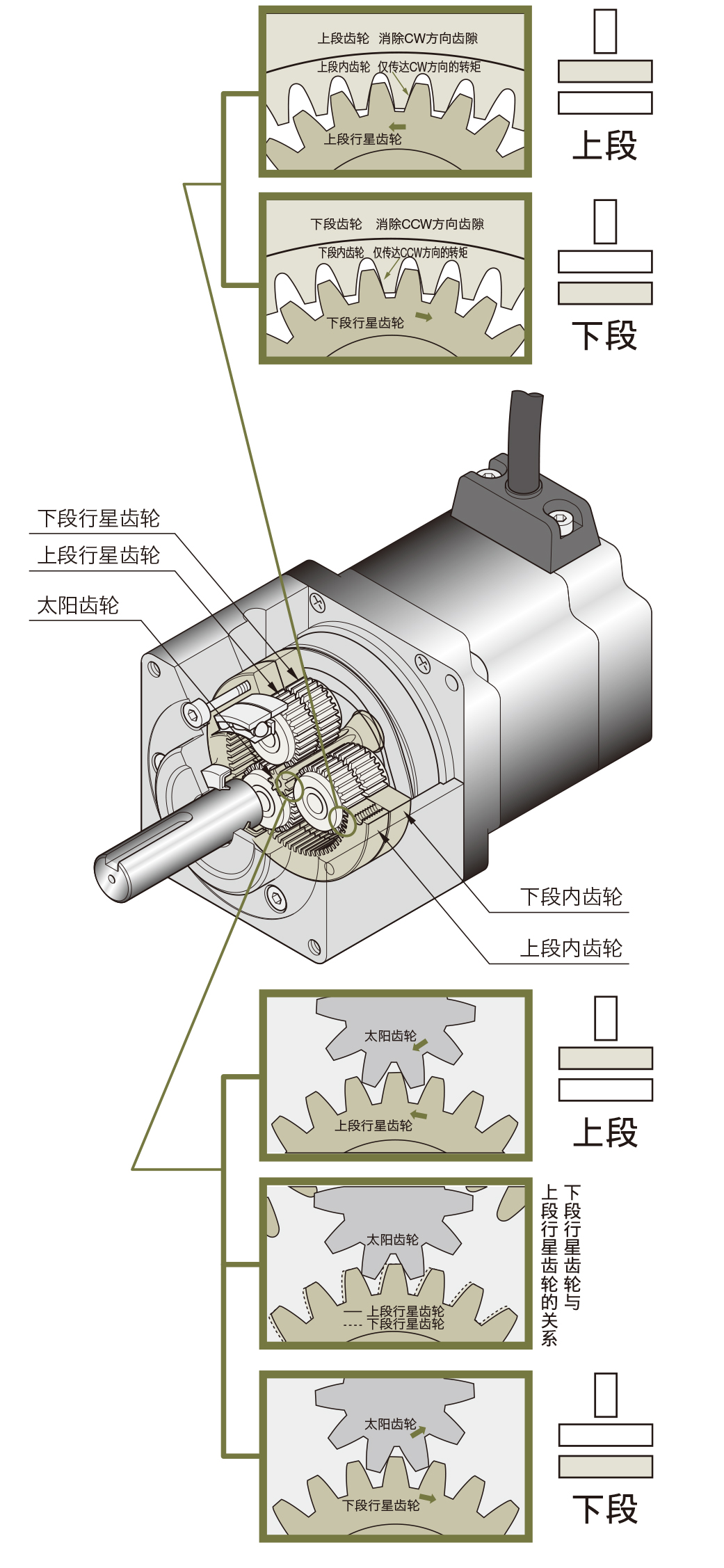
PN减速机是与PS减速机同样的行星齿轮机构的减速机。为使各零件的加工精度提高,采用了齿隙去除机构,实现了规格值3分以内的齿隙。齿隙去除机构是将内齿轮及行星齿轮分别配置成上下两段,并将内齿轮朝圆周方向拧动。因此,上段的内齿轮与行星齿轮去除了CW方向的齿隙,而下段的内齿轮与行星齿轮则去除了CCW方向的齿隙。
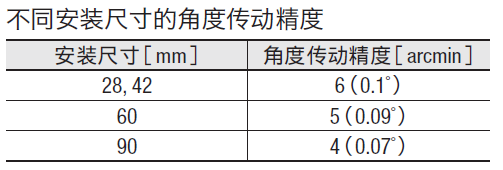
 ◇ 角度传动精度
◇ 角度传动精度
是指从输入脉冲数计算出输出轴的理论旋转角度与实际旋转角度的误差。表示从任意位置测量输出轴旋转1次时误差的最小值与最大值的幅度。
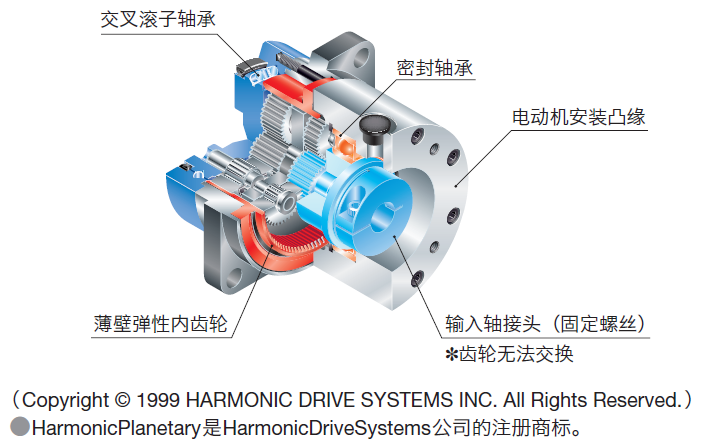
是将薄壁弹性齿轮技术运用到行星齿轮减速机内齿轮的行星齿轮减速装置。因此,利用内齿轮的弹性变形,在没有调整机构的情况下实现了小齿隙。
行星齿轮减速机是太阳齿轮与行星齿轮、行星齿轮与内齿轮都同时相互啮合的构造。因此,如果只用零件的尺寸精度减少齿隙,则会受到尺寸误差的影响而干扰啮合部分,可能导致旋转转矩不均匀或产生噪音。为解决此类问题,开发了缓和啮合部分干扰的功能及兼备足够强度的“薄壁弹性内齿轮”,诞生了划时代性构造的行星齿轮减速机HarmonicPlanetary。HarmonicPlanetary在减速机的使用寿命范围内几乎没有齿隙变化。
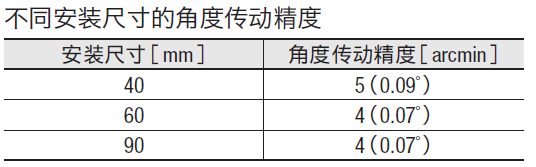
 ◇ 角度传动精度
◇ 角度传动精度
是指从输入脉冲数计算出输出轴的理论旋转角度与实际旋转角度的误差。表示从任意位置测量输出轴旋转1次时误差的最小值与最大值的幅度。
就减速机而言,谐波减速机拥有无可比拟的优异定位精度特性,是由运用金属弹性力的3个基本零件(波发生器、柔轮、刚轮)所组成。
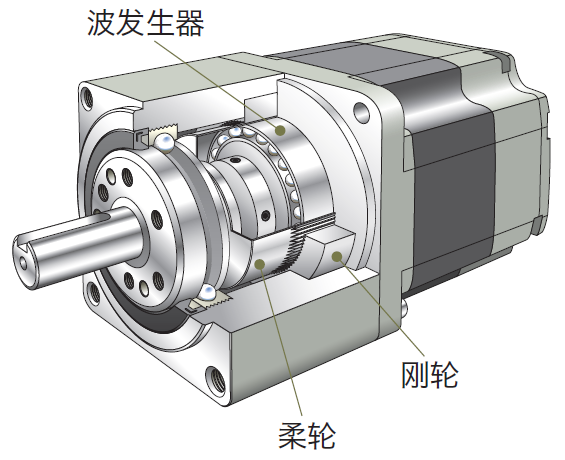 波发生器
波发生器
椭圆形凸轮的外圈上嵌入薄型的滚珠轴承,整体呈一椭圆形状的零件。轴承的内圈固定于椭圆形凸轮之上,外圈则介由滚珠弹性变形。安装于电动机转轴上。
柔轮
为制成薄型杯状的金属弹性体零件。杯开口部位外缘刻有小齿。柔轮底部安装到减速机输出轴。
刚轮
刚性体的内齿轮。内侧上刻有与柔轮同样大小的小齿,且比柔轮多2个齿数。外圈部分固定于减速机外壳上。
◇ 精度
谐波减速机与使用一般直齿轮的减速机不同,没有齿隙(小齿互相啮合间隙)。同时,相互啮合的齿数较多,小齿的齿距误差或累积齿距误差的旋转精度的影响被平均分散掉,可发挥高定位精度的特性。此外,谐波减速机的减速比较高,因此,在输出轴施加负载转矩时的扭转,即使与电动机单体及其它减速电动机相比,也会非常小,且具有高刚性。由于刚性较高,因此,即使负载变动大,也可以非常稳定的定位。对要求较高的定位精度及刚性时,请参考以下特性。
◇ 角度传动精度
是指从输入脉冲数计算出输出轴的理论旋转角度与实际旋转角度的误差。表示从任意位置测量输出轴旋转1次时误差的最小值与最大值的幅度。
内齿轮 :为固定于减速机外壳上的圆筒状的齿轮,内侧有小齿。
PN减速机
◇ 原理与构造PN减速机是与PS减速机同样的行星齿轮机构的减速机。为使各零件的加工精度提高,采用了齿隙去除机构,实现了规格值3分以内的齿隙。齿隙去除机构是将内齿轮及行星齿轮分别配置成上下两段,并将内齿轮朝圆周方向拧动。因此,上段的内齿轮与行星齿轮去除了CW方向的齿隙,而下段的内齿轮与行星齿轮则去除了CCW方向的齿隙。
是指从输入脉冲数计算出输出轴的理论旋转角度与实际旋转角度的误差。表示从任意位置测量输出轴旋转1次时误差的最小值与最大值的幅度。
HPG减速机
◇ 原理与构造是将薄壁弹性齿轮技术运用到行星齿轮减速机内齿轮的行星齿轮减速装置。因此,利用内齿轮的弹性变形,在没有调整机构的情况下实现了小齿隙。
行星齿轮减速机是太阳齿轮与行星齿轮、行星齿轮与内齿轮都同时相互啮合的构造。因此,如果只用零件的尺寸精度减少齿隙,则会受到尺寸误差的影响而干扰啮合部分,可能导致旋转转矩不均匀或产生噪音。为解决此类问题,开发了缓和啮合部分干扰的功能及兼备足够强度的“薄壁弹性内齿轮”,诞生了划时代性构造的行星齿轮减速机HarmonicPlanetary。HarmonicPlanetary在减速机的使用寿命范围内几乎没有齿隙变化。
是指从输入脉冲数计算出输出轴的理论旋转角度与实际旋转角度的误差。表示从任意位置测量输出轴旋转1次时误差的最小值与最大值的幅度。
谐波减速机
◇ 原理构造就减速机而言,谐波减速机拥有无可比拟的优异定位精度特性,是由运用金属弹性力的3个基本零件(波发生器、柔轮、刚轮)所组成。
椭圆形凸轮的外圈上嵌入薄型的滚珠轴承,整体呈一椭圆形状的零件。轴承的内圈固定于椭圆形凸轮之上,外圈则介由滚珠弹性变形。安装于电动机转轴上。
柔轮
为制成薄型杯状的金属弹性体零件。杯开口部位外缘刻有小齿。柔轮底部安装到减速机输出轴。
刚轮
刚性体的内齿轮。内侧上刻有与柔轮同样大小的小齿,且比柔轮多2个齿数。外圈部分固定于减速机外壳上。
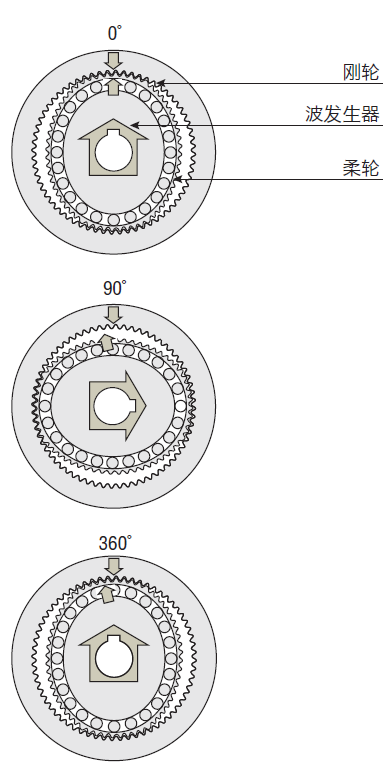 |
将3件基本零件组合。柔轮随波发生器变形为椭圆状,椭圆的长轴部分则与刚轮小齿部分互相啮合,而短轴部分小齿则完全呈脱离状态。 将刚轮固定,将波发生器(输入)朝顺时针方向旋转,此时柔轮会产生弹性变形,而与刚轮小齿互相啮合的位置将按顺序移动。 波发生器每旋转一圈,柔轮因比刚轮齿数少2个齿数,因此会与波发生器的旋转方向相反,亦即朝逆时针方向移动2个齿数差。输出这一动作并进行减速。 |
◇ 精度
谐波减速机与使用一般直齿轮的减速机不同,没有齿隙(小齿互相啮合间隙)。同时,相互啮合的齿数较多,小齿的齿距误差或累积齿距误差的旋转精度的影响被平均分散掉,可发挥高定位精度的特性。此外,谐波减速机的减速比较高,因此,在输出轴施加负载转矩时的扭转,即使与电动机单体及其它减速电动机相比,也会非常小,且具有高刚性。由于刚性较高,因此,即使负载变动大,也可以非常稳定的定位。对要求较高的定位精度及刚性时,请参考以下特性。
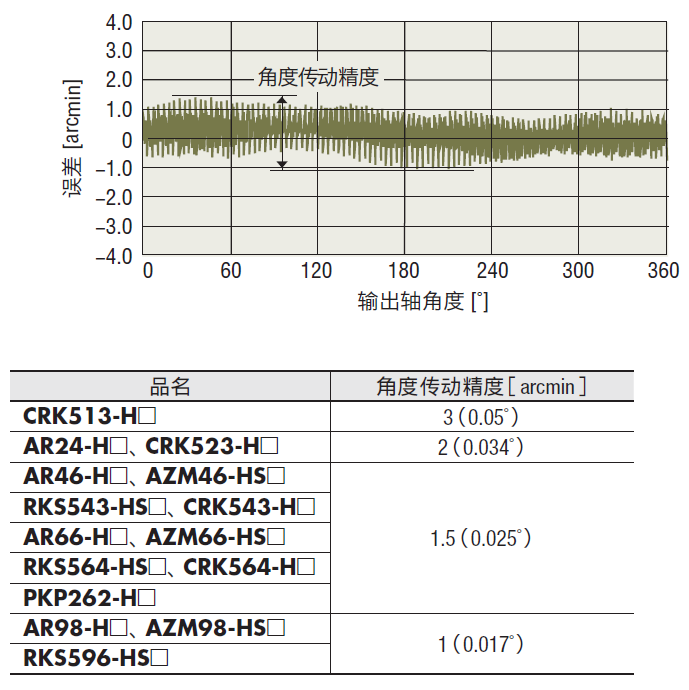
◇ 角度传动精度
是指从输入脉冲数计算出输出轴的理论旋转角度与实际旋转角度的误差。表示从任意位置测量输出轴旋转1次时误差的最小值与最大值的幅度。
这是无负载条件下的值(减速机部参考值)。但是,实际的用途上必然产生摩擦负载,出现与摩擦负载相应的变位。当摩擦负载一定时,若朝同一方向运行则变位固定,但若从正反两方向运行,则往返间将产生两倍的变位。该变位可通过下面的转矩―扭转特性来推测。
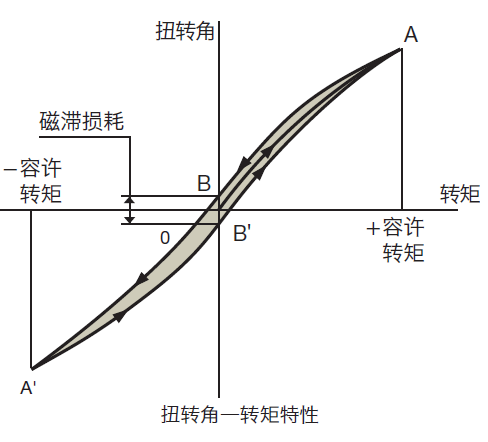
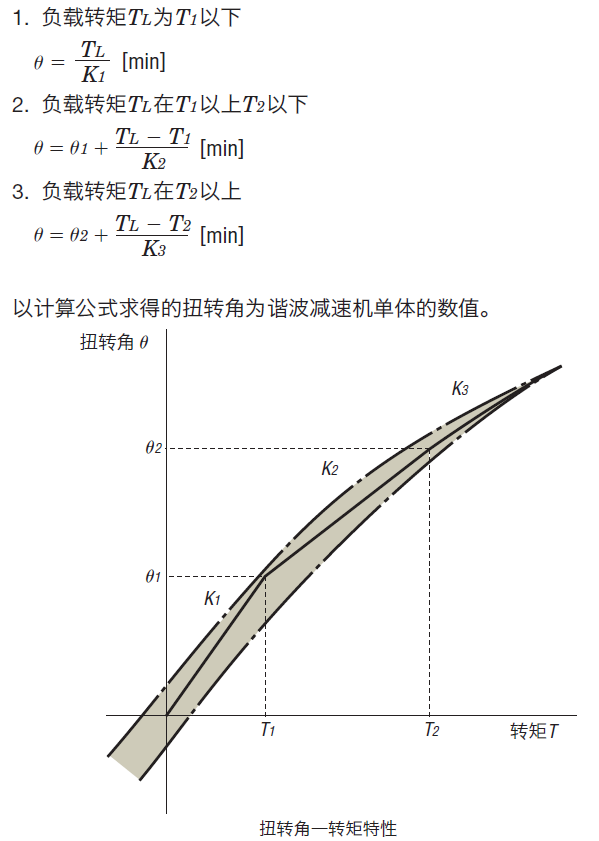
转矩―扭转特性
图表中的转矩―扭转特性是将电动机轴进行固定,然后慢慢朝正反方向向输出轴施加或减少负载(转矩)时的变位(扭转)图。如上所述,向输出轴施加负载时,会因减速机的弹簧常数的关系而产生变位。
转矩―扭转特性
图表中的转矩―扭转特性是将电动机轴进行固定,然后慢慢朝正反方向向输出轴施加或减少负载(转矩)时的变位(扭转)图。如上所述,向输出轴施加负载时,会因减速机的弹簧常数的关系而产生变位。
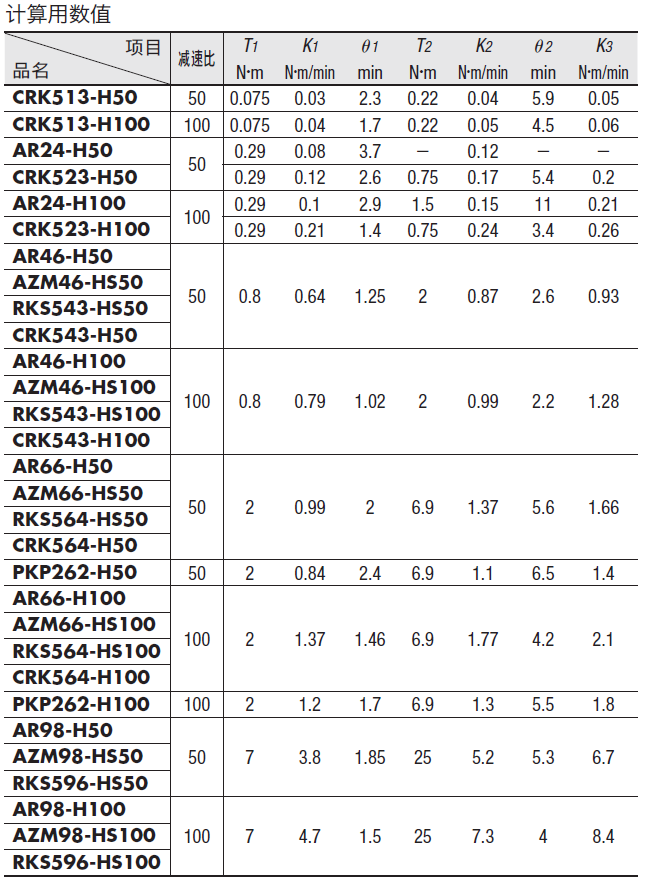
该变位在停止时施加外力及在施加了摩擦负载的状态下进行驱动的情况下会发生。该倾斜率可根据负载转矩的大小,使用以下3个区间的弹簧常数算出近似值,或通过计算进行推定。
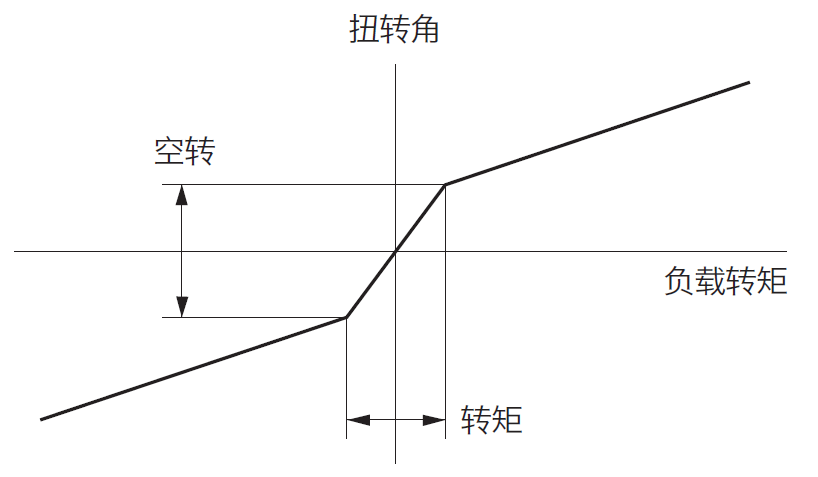
磁滞损耗
从转矩―扭转特性可以看出,朝正反方向施加转矩到容许转矩后,即使将转矩减少为0,扭转角也不会完全变回0,仍残留有一点扭转。(图B-B’)这就是磁滞损耗,该磁滞损耗设计在2分以内。停止时施加外力、通过惯性驱动施加加减速转矩、驱动中施加摩擦负载等时,即使将负载降为0,在此磁滞损耗作用下,有时仍会残留有稍许扭转。
空转
谐波减速机完全没有齿隙,因此减速机的精度则以空转作为其基准值。空转是减速机输出轴施加容许转矩的约5%的转矩时,所产生变位的合计值。
 |
 |
从转矩―扭转特性可以看出,朝正反方向施加转矩到容许转矩后,即使将转矩减少为0,扭转角也不会完全变回0,仍残留有一点扭转。(图B-B’)这就是磁滞损耗,该磁滞损耗设计在2分以内。停止时施加外力、通过惯性驱动施加加减速转矩、驱动中施加摩擦负载等时,即使将负载降为0,在此磁滞损耗作用下,有时仍会残留有稍许扭转。
空转
谐波减速机完全没有齿隙,因此减速机的精度则以空转作为其基准值。空转是减速机输出轴施加容许转矩的约5%的转矩时,所产生变位的合计值。
相关产品
 |
▶αSTEP AZ系列(备有各种减速机型)
闭环控制系统αSTEP, 搭载无需电池就能实现绝对方式定位的机械式绝对编码器。 |
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。