
会员登录/注册








机构一体化产品的选用——小型电动直线传动装置的选用
| 除了选用电动机作为自动化设备的驱动源,很多情况下,电动机会与滚珠螺杆、皮带轮及齿条·齿轮等机构部件组合使用,将电动机的旋转运动转换成驱动部所需的运动。 为了能够满足各种自动化机器的需求,东方马达为客户提供各种将机构部件组装到电动机上的电动传动装置,实现电动机与机构的一体化,提高设计的工作效率,缩短制作时间及提高产品质量。 |
| ▶电动滑台/电动缸的选用 |
▶小型电动直线传动装置的选用 |
| ▶齿轮·齿条系统的选用
|
▶中空旋转平台的选用
|
点击查看小型电动直线传动装置的选用相关内容说明:
● DR系列 工作台型、宽平台型 /DRS2系列 带导轨型
● DR系列 带导轨推杆型
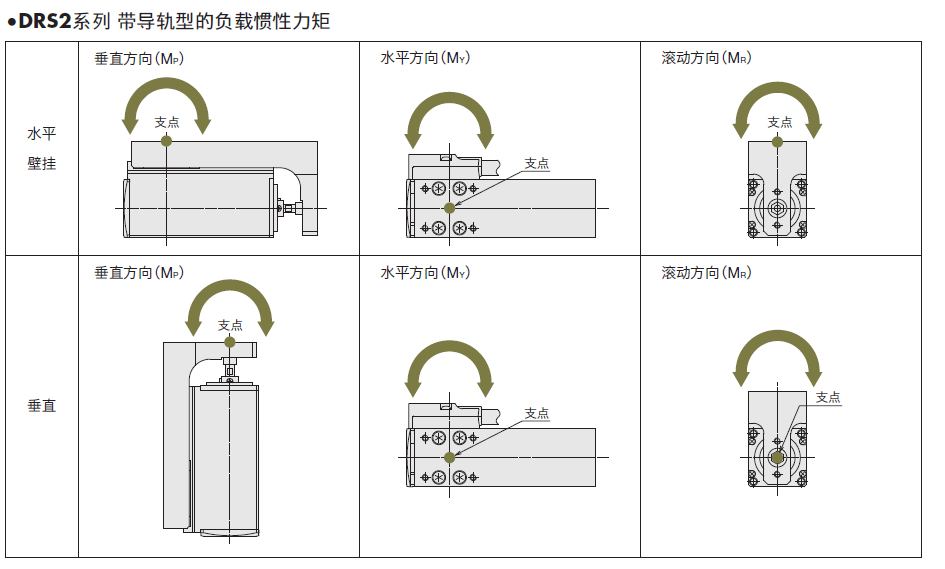
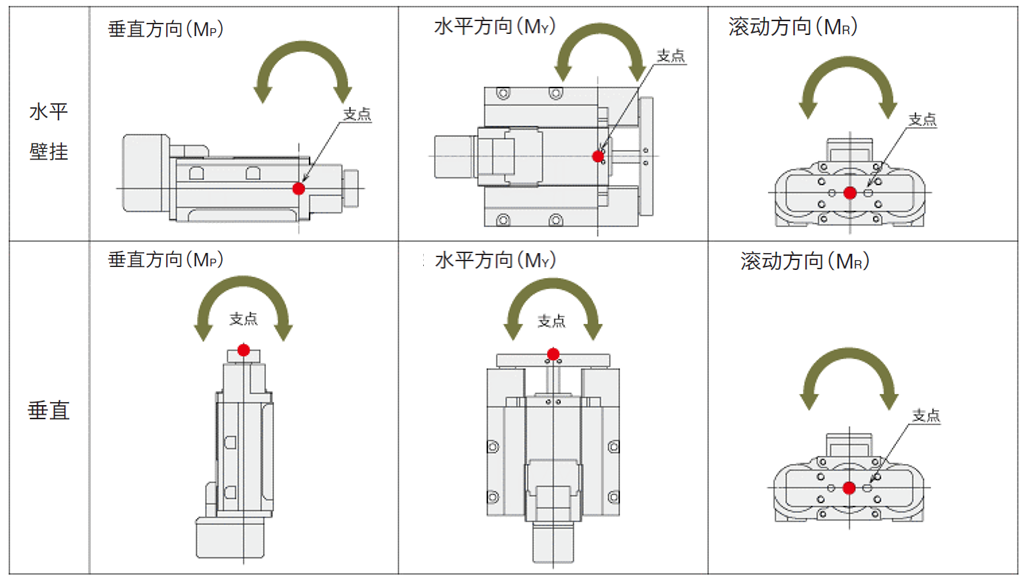
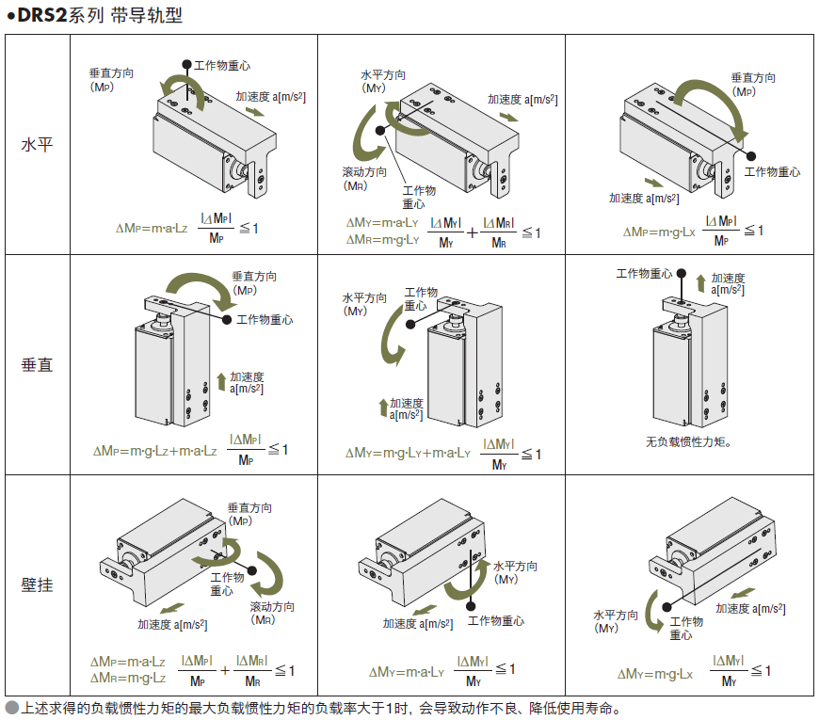
根据偏置位置,作用方向分别向垂直方向(MP)、水平方向(MY)和滚动方向(MR)作用。
DR系列 工作台型、宽平台型 /DRS2系列 带导轨型 的负载惯性力矩
下图为,DRS2系列 带导轨型的图例。
DR系列 带导轨推杆型 的负载惯性力矩
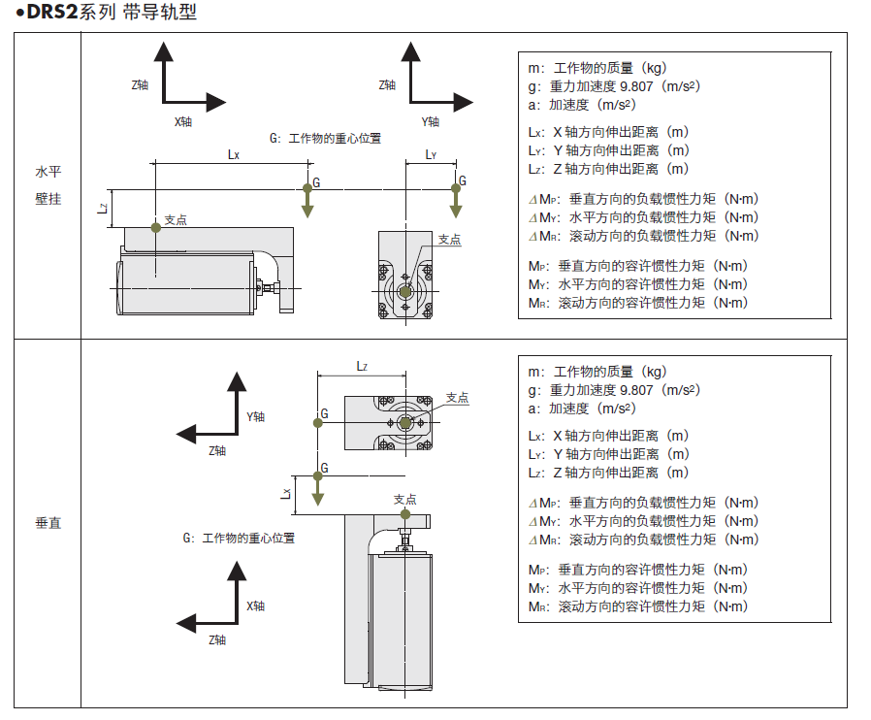
选用的电动传动装置即使满足搬运质量、定位时间的条件,但如果工作物的重心位置超出接头中心,就会因为负载惯性力矩而缩短其运行寿命。 因此有必要计算负载惯性力矩,并确认其是否在规格值范围内。请确认静止状态时作用的惯性力矩为静态容许惯性力矩,工作中作用的惯性力矩 的任一个为最大负载惯性力矩。
*垂直方向时会改变惯性力矩计算的接头中心位置。
从工作物、负载的施力点求出施加给使用的小型电动直线传动装置的负载惯性力矩,确认并未超过最大负载惯性力矩,并且强度也足够。
DR系列 工作台型、宽平台型 /DRS2系列 带导轨型
下图为,DRS2系列 带导轨型的图例。
● 负载惯性力矩判断公式 :
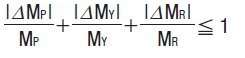
伸出范围的工作物为复数时需用各工作物惯性力矩的和来判定。
● 工作物为复数(n个)时

DR系列 工作台型、宽平台型 /DRS2系列 带导轨型
下图为,DRS2系列 带导轨型的图例。
|
|
负载惯性力矩计算 |
关于负载惯性力矩
在用以下产品搬运工作物时,以工作台中心为原点,若工作物的重心位置偏置,负载惯性力矩会对导轨发生作用。● DR系列 工作台型、宽平台型 /DRS2系列 带导轨型
● DR系列 带导轨推杆型
根据偏置位置,作用方向分别向垂直方向(MP)、水平方向(MY)和滚动方向(MR)作用。
DR系列 工作台型、宽平台型 /DRS2系列 带导轨型 的负载惯性力矩
下图为,DRS2系列 带导轨型的图例。
DR系列 带导轨推杆型 的负载惯性力矩
选用的电动传动装置即使满足搬运质量、定位时间的条件,但如果工作物的重心位置超出接头中心,就会因为负载惯性力矩而缩短其运行寿命。 因此有必要计算负载惯性力矩,并确认其是否在规格值范围内。请确认静止状态时作用的惯性力矩为静态容许惯性力矩,工作中作用的惯性力矩 的任一个为最大负载惯性力矩。
*垂直方向时会改变惯性力矩计算的接头中心位置。
从工作物、负载的施力点求出施加给使用的小型电动直线传动装置的负载惯性力矩,确认并未超过最大负载惯性力矩,并且强度也足够。
DR系列 工作台型、宽平台型 /DRS2系列 带导轨型
下图为,DRS2系列 带导轨型的图例。
● 负载惯性力矩判断公式 :
伸出范围的工作物为复数时需用各工作物惯性力矩的和来判定。
● 工作物为复数(n个)时
负载惯性力矩作用的考虑点
停止状态下和工作状态下负载惯性力矩作用时,请考虑加速度,确认动态、静态惯性力矩,并与最大负载惯性力矩对比。DR系列 工作台型、宽平台型 /DRS2系列 带导轨型
下图为,DRS2系列 带导轨型的图例。
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。