会员登录/注册








机构一体化产品的选用——中空旋转平台的选用
| 除了选用电动机作为自动化设备的驱动源,很多情况下,电动机会与滚珠螺杆、皮带轮及齿条·齿轮等机构部件组合使用,将电动机的旋转运动转换成驱动部所需的运动。 为了能够满足各种自动化机器的需求,东方马达为客户提供各种将机构部件组装到电动机上的电动传动装置,实现电动机与机构的一体化,提高设计的工作效率,缩短制作时间及提高产品质量。 |
| ▶电动滑台/电动缸的选用 |
▶小型电动直线传动装置的选用 |
| ▶齿轮·齿条系统的选用
|
▶中空旋转平台的选用
|
点击查看中空旋转平台选用相关内容说明:
1、负载转动惯量的计算
计算搬运物的转动惯量(负载转动惯量)(公式点此参考)。
搬运物的转动惯量请以传动装置转动惯量的30倍以下作为基准。
2、机型的选用
① 没有摩擦转矩时,请参照DG 系列的负载转动惯量―定位时间图表来确认定位时间。
②确定定位时间与加减速时间。
但是,通过定位时间≧ 负载转动惯量―定位时间图表求得最短定位时间请取加减速时间t1 × 2≦定位时间。
③ 确定起动转速N1,然后按下面公式算出运行转速N2。请将N1设定为低速[0∼数r/min],注意不要设得太大。
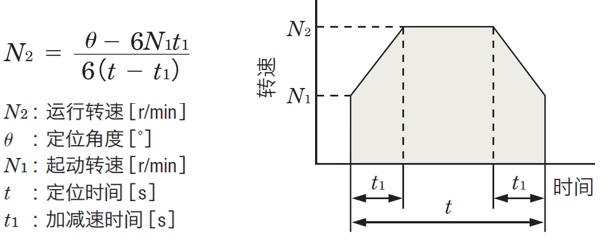
按上述计算式得出的结果若不能满足N1≦N2≦200[r/min]的条件,
则请返回①,再次确认条件。
3、必要转矩的计算
①通过下式计算加速转矩。

② 计算必要转矩。必要转矩为由摩擦阻力引起的负载转矩与由转动惯量引起的加速转矩相加,再乘以安全系数后得出的数值。
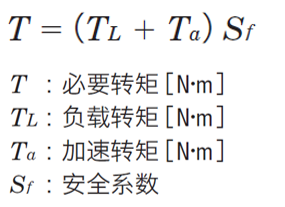
安全系数Sf 请设定在1.5以上(搭载AZ系列AC电源输入型时)。
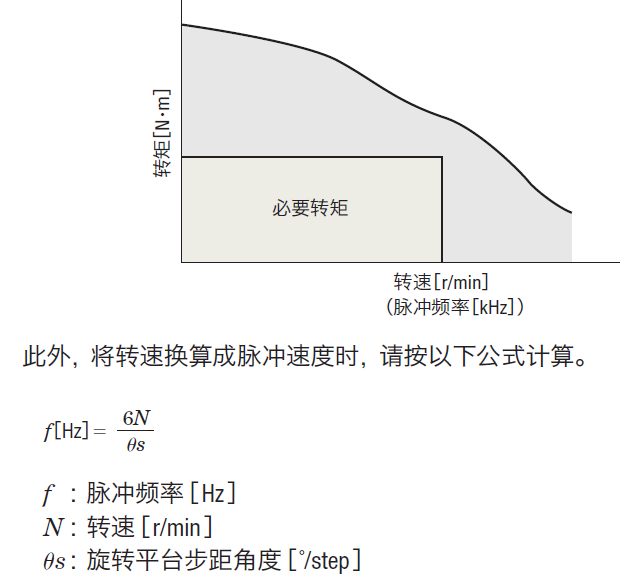
③ 确认必要转矩T是否包含在转速―转矩特性的范围以内。
4、负载惯性力矩、轴向负载的计算
|
|
DGⅡ系列的选用 |
DGⅡ系列的选用
以下对DG2 系列选用计算进行说明。1、负载转动惯量的计算
计算搬运物的转动惯量(负载转动惯量)(公式点此参考)。
搬运物的转动惯量请以传动装置转动惯量的30倍以下作为基准。
2、机型的选用
① 没有摩擦转矩时,请参照DG 系列的负载转动惯量―定位时间图表来确认定位时间。
②确定定位时间与加减速时间。
但是,通过定位时间≧ 负载转动惯量―定位时间图表求得最短定位时间请取加减速时间t1 × 2≦定位时间。
③ 确定起动转速N1,然后按下面公式算出运行转速N2。请将N1设定为低速[0∼数r/min],注意不要设得太大。
3、必要转矩的计算
①通过下式计算加速转矩。
② 计算必要转矩。必要转矩为由摩擦阻力引起的负载转矩与由转动惯量引起的加速转矩相加,再乘以安全系数后得出的数值。
安全系数Sf 请设定在1.5以上(搭载AZ系列AC电源输入型时)。
③ 确认必要转矩T是否包含在转速―转矩特性的范围以内。
4、负载惯性力矩、轴向负载的计算
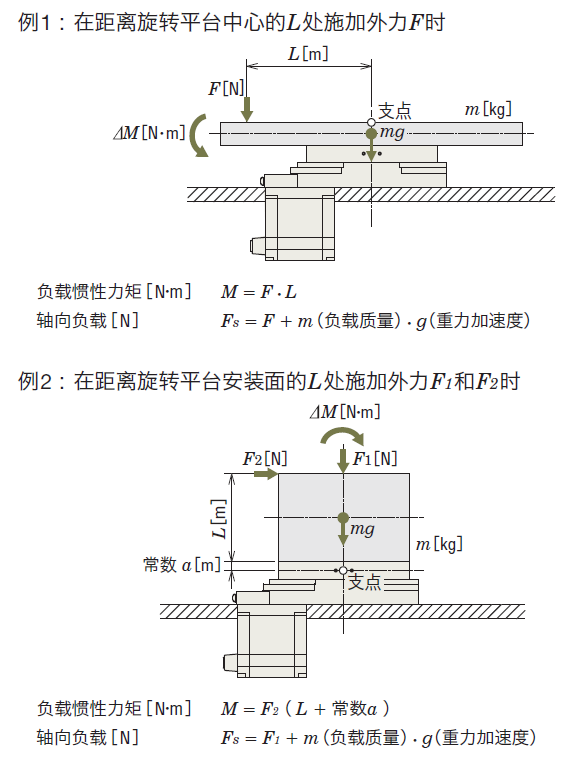
如下图所示当旋转平台上载有负载时,请按下面的公式算出负载惯性
力矩与轴向负载,并确认是否在规格值内。
| 品名 | 支撑旋转平台的 轴承 |
容许惯性力矩 [N・m] |
容许轴向负载 [N] |
|---|---|---|---|
| DGM60 | 深槽滚珠轴承 | 2 | 100 |
| DGM85R、DGB85R | 交叉滚子轴承 | 10 | 500 |
| DGM130R、DGB130R | 50 | 2000 | |
| DGM200R | 100 | 4000 |
| 品名 | DGM60 | DGM85R、 DGB85R |
DGM130R、 DGB130R |
DGM200R |
|---|---|---|---|---|
| 支撑旋转平台的 轴承 |
深槽滚珠轴承 | 交叉滚子轴承 | ||
| 常数a [mm] | 10 | 20 | 30 | 40 |
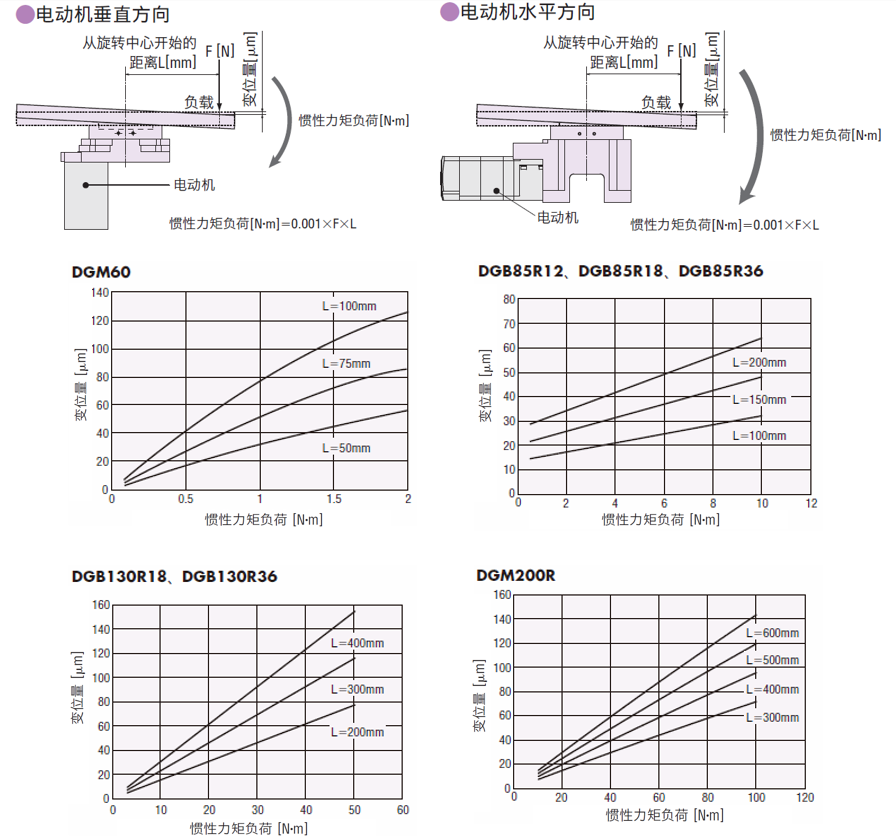
因负载惯性力矩引起的变位量(参考值)
在旋转平台上附加负载惯性力矩时,会发生变位。
图表中的变位量显示负载惯性力矩按固定方向作用时,在距离旋转平台旋转中心的L位置上的变位。负载惯性力矩若从正负两方向作用时,变位量约为2倍。
图表中的变位量显示负载惯性力矩按固定方向作用时,在距离旋转平台旋转中心的L位置上的变位。负载惯性力矩若从正负两方向作用时,变位量约为2倍。