








晶圆单片清洗设备应用提案
装置概要
晶圆单片清洗设备由于工艺效果好、均匀性高,不易产生交叉污染,逐渐成为了半导体制造中的主流湿法清洗设备。该设备在晶圆上、下料、CUP升降装置、喷淋/清洗装置等机构应用上,东方马达均提供强有力的解决方案。通过搭载步进伺服混合控制系统αSTEP AZ系列及其模组化产品,达成小型化、高精度、节省设计、装配的人力和时间成本等多项课题。 以下为您介绍各工位应用提案:


晶圆上、下料工位——SCARA机器人应用
自制SCARA机器人常用于取放工作物、实现设备之间的搬送自动化,用以替代以往需要人工进行的连结、测量、组装等手工作业产线,在有限的空间中实现简易、高效的取放及设备间的自动化搬送。

|

|
小型化电动机、模组产品的组合应用,实现机器人小型化

Axis1 采用全长较短的EZS系列折返型电动滑台,有利于节省装置的空间,实现了装置的小型化设计,可满足产线的装置宽度限制。 (另可详见CUP装置升降工位的介绍。) Axis2 SCARA机器人在抓取距轴端较远的机械臂前端工作物时,高刚性的DGⅡ系列中空旋转平台可提供高容许转矩和容许惯性力矩,因此有助于扩大机械臂的可动范围。(另可详见摆臂工位--旋转轴的介绍。)
|
  |
可根据安装空间选择电动机垂直组装型或水平组装型,电动机水平组装型无需加工电动机的安装用预留槽,简化安装板。


Axis3、4
αSTEP AZ系列 FC减速机型是由半轴齿轮(圆盘状的齿轮)与直齿轮构成的直交轴减速机。相对于负载轴,电动机可呈直角安装,有助于省空间。

薄型机器人
FC减速机型在机器人关节的旋转应用,压缩了机器人整体的高度,使得机器人更加小型、薄型。

轻松导入自制机器人
机器人控制器通过“初始设定”、“动作编程”、“动作确认”3 步,可轻松导入、控制自制机器人。可控制使用了混合控制系统αSTEP AZ系列/搭载AZ系列电动传动装置的自制机器人。
MRC01可以通过编程软件MRC Studio设定的动作程序,仅用电脑轻松进行示教、动作确认。

免费的编程软件,快速上手掌握控制
备有机器人控制器MRC01。使用其专用的编程软件MRC Studio,即使无编程经验,也可马上进行编程·控制。通过使用MRC01,降低了编程·控制的难度,有助于自制机器人的顺利研发。
约30分钟即可掌握
即使无机器人控制经验,也可约10分钟进行初始设定,约20分钟掌握编程,总共花大约30分钟掌握MRC Studio的使用方法。
机器人编程、控制简单
为了让无机器人控制经验的客户也能编程,使用了直观表现动作的动作指令按钮图标。即使没有上位控制器,通过直接I/O亦可驱动程序。
指令使用了直观体现动作的图标

圆弧的动作,仅需选择指令后在坐标中输入

机器人类型多样化选择
以向导形式进行机器人类型的选择和机构信息的输入等一系列初始设定,通过边看图解边按照指导说明进行设定、选择。目前可支持32种机器人类型的选用。
|
轻松选用机器人类型
大幅降低前期机器人模型搭建的算法构建难题,简便选用合适的模型,提高自制机器人研发效率。
|

搭载产品
|
机器人控制器通过“初始设定”、“动作编程”、“动作确认”3 步,
可轻松导入、控制自制机器人。 可控制使用了αSTEP AZ系列/搭载AZ系列电动传动装置的自制机器人。
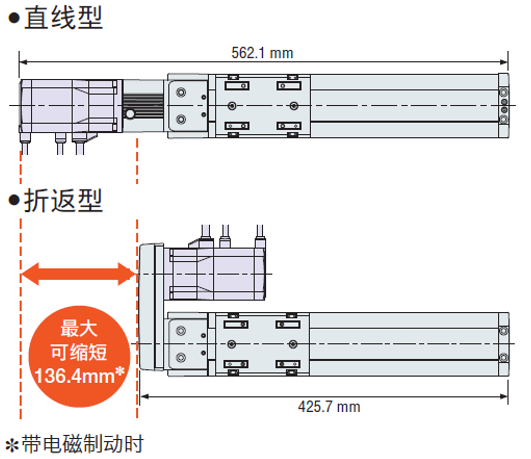
▶电动滑台 EZS系列 通过电动滑台实现步进电动机的高响应、低振动、无微振运行。 产品阵容丰富,包括直线型、折返型、无尘室对应,可根据装置空间、环境选用。
▶中空旋转式传动装置 DGII系列 传动装置内部为减速机构,因此可进行高输出功率驱动。
▶αSTEP AZ系列
|
|
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。 如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
|