








αSTEP/步进电动机
| ▶步进电动机的构造 |
▶步进电动机的工作原理 |
| ▶步进电动机的基本特性 |
▶步进电动机组合产品 |
| ▶步进电动机的驱动器 |
▶闭环步进电动机αSTEP |
| ▶利用励磁定时信号的机械原点返回运行 |
▶电缆线长度与传送频率的关系 |
| ▶联轴器刚性对装置的影响 |
|
|
|
步进电动机的工作原理 |
下面以5相步进电动机为实例,针对实际上经过磁化后的转子及定子的小齿的位置关系进行说明。
将A相励磁时
将A相励磁,会使得磁极磁化成S极,而其将与带有N极极性的转子1的小齿互相吸引,并与带有S极极性的转子2的小齿相斥,于平衡后停止。此时,没有励磁的B相磁极的小齿和带有S极极性的转子2的小齿互相偏离0.72°。以上是A相励磁时的定子和转子小齿的位置关系。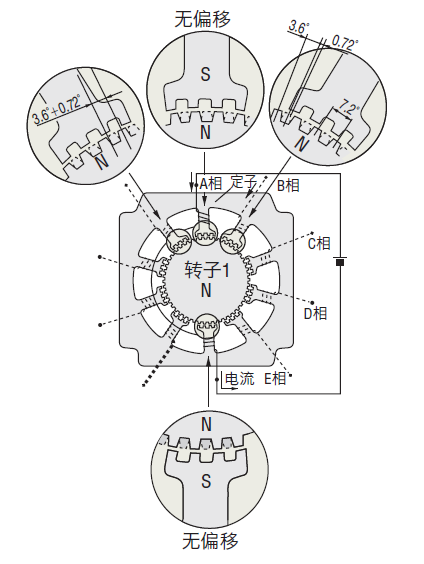
将B相励磁时
其次由A相励磁转为B相励磁时,B相磁极磁化成N极,与拥有S极极性的转子2互相吸引,而与拥有N极极性的转子1相斥。
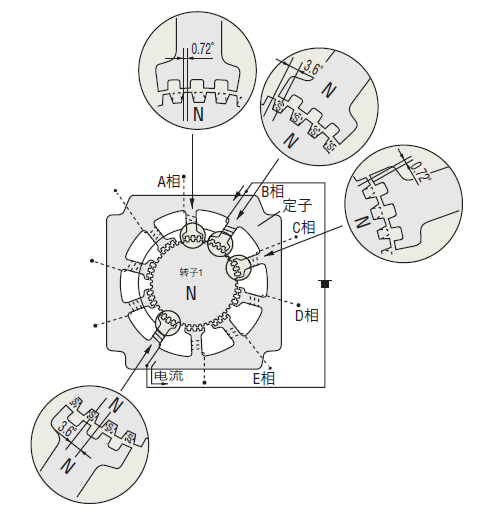
也就是说,将励磁相从A相励磁转换至B相励磁时,转子旋转0.72°。由此可知,励磁相位随A相→B相→C相→D相→E相→A相依次转换,则步进电动机以每次0.72°做正确的旋转。此外,希望作反方向旋转时,只需将励磁顺序倒转,依照A相→E相→D相→C相→B相→A相励磁即可。
0.72°的高分辨率取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确定位。此外,就停止精度而言,只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等因素会造成影响,因此可获得±3分(空载时)的高停止精度。实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换定时则是由输入驱动器的脉冲信号所进行。以上举的是单相励磁的例子,实际运转时,为了有效利用线圈,4相或5相同时进行励磁。
0.72°的高分辨率取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确定位。此外,就停止精度而言,只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等因素会造成影响,因此可获得±3分(空载时)的高停止精度。实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换定时则是由输入驱动器的脉冲信号所进行。以上举的是单相励磁的例子,实际运转时,为了有效利用线圈,4相或5相同时进行励磁。
按用途选择电动机
针对您对电动机的基础要求,助您挑选符合条件的产品。