








αSTEP/步进电动机
| ▶步进电动机的构造 |
▶步进电动机的工作原理 |
| ▶步进电动机的基本特性 |
▶步进电动机组合产品 |
| ▶步进电动机的驱动器 |
▶闭环步进电动机αSTEP |
| ▶利用励磁定时信号的机械原点返回运行 |
▶电缆线长度与传送频率的关系 |
| ▶联轴器刚性对装置的影响 |
|
|
|
步进电动机的基本特性 |
使用步进电动机时,电动机的特性是否符合使用条件,是相当重要的一点。在此说明步进电动机使用时的重要特性。步进电动机的特性可大略分为两项。
● 动特性 :
这是与步进电动机起动或旋转时有关的特性,主要会影响机器的工作、周期时间等。
● 静特性 :
这是与步进电动机停止时角度变化有关的特性,主要会影响机器的精度。
动特性
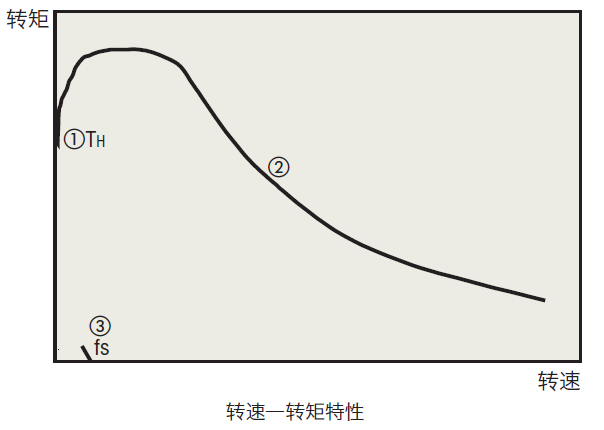
● 转速―转矩特性这是表示驱动步进电动机时的转速和转矩的关系,如特性图所示。
是选用步进电动机时所必须考虑的特性。横轴代表电动机输出轴的转速,而纵轴则代表转矩。转速―转矩特性取决于电动机及驱动器,因使用的驱动器种类不同会有较大差异。
①最大励磁转矩(TH :Holding Torque)
是指步进电动机在通电状态(额定电流)下停止时,本身保有的最大保持转矩(保持力)。
②最大同步转矩(Pullout Torque)
各转速所能产生的最大转矩。选用电动机时,必要转矩必须在本曲线的内侧。
③最大自起动频率(fS)
步进电动机的摩擦负载、惯性负载为0时,瞬间(无加减速时间)能起动、停止的最大脉冲频率。当在超过此脉冲频率的情况下驱动电动机时,应逐渐进行加减速。随电动机承载的惯性负载增加,此频率亦逐渐降低。
(参考惯性负载―自起动频率特性)
最大响应频率(fr)
步进电动机的摩擦负载、惯性负载为0时,进行缓慢的加减速时可运行的最大脉冲频率。
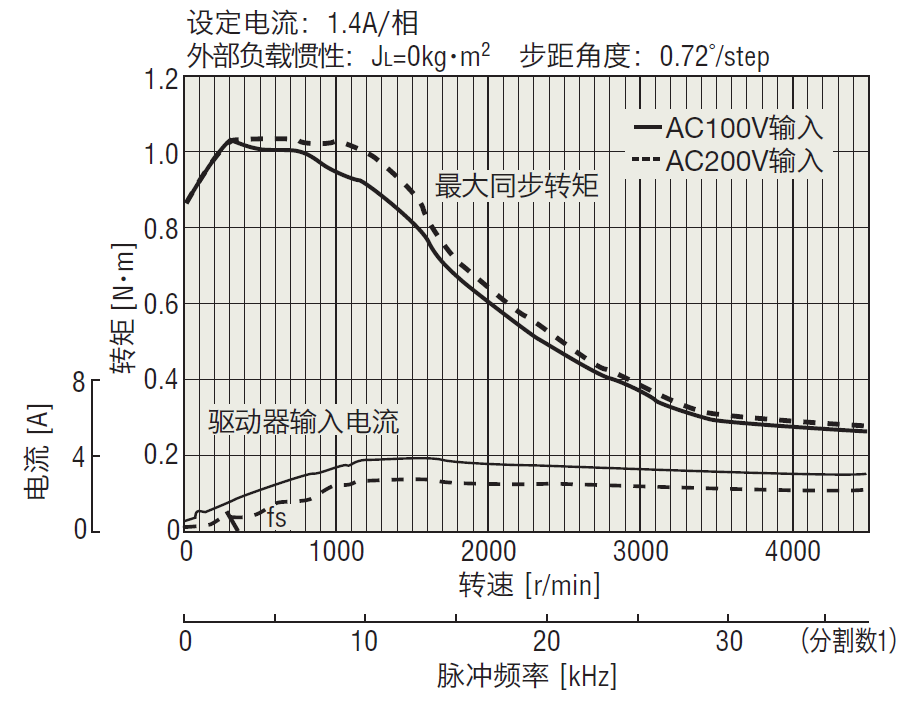
下图为代表5相步进电动机组合产品的转速―转矩特性。
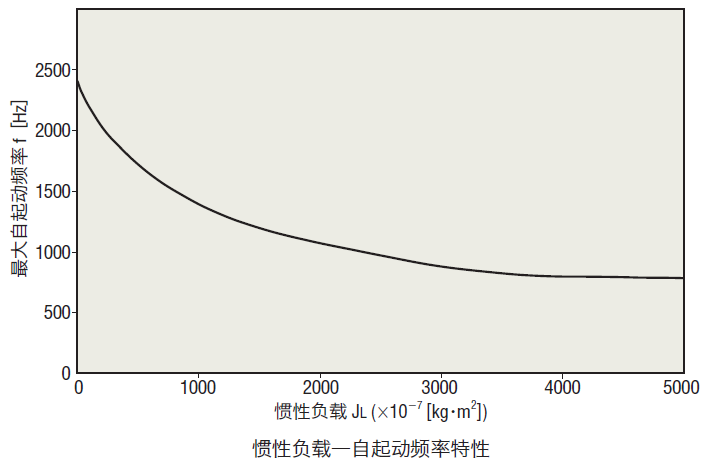
●惯性负载―自起动频率特性
表示因自起动频率的惯性负载而产生变化的特性。
步进电动机的转子本身或负载,因有转动惯量存在,因此于瞬时起动或停止时,电动机轴会产生延迟或超过的现象。此数值会随脉冲频率而变化,但是若超过某一数值时电动机将无法跟踪脉冲频率,而产生失步(miss-step)现象。
将即将失步前的脉冲频率称为自起动频率。
表示因自起动频率的惯性负载而产生变化的特性。
步进电动机的转子本身或负载,因有转动惯量存在,因此于瞬时起动或停止时,电动机轴会产生延迟或超过的现象。此数值会随脉冲频率而变化,但是若超过某一数值时电动机将无法跟踪脉冲频率,而产生失步(miss-step)现象。
将即将失步前的脉冲频率称为自起动频率。
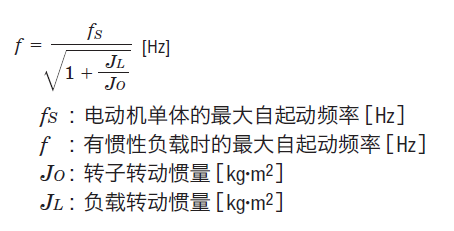
相对于惯性负载的最大自起动频率的变化可以根据下列公式算出近似值。
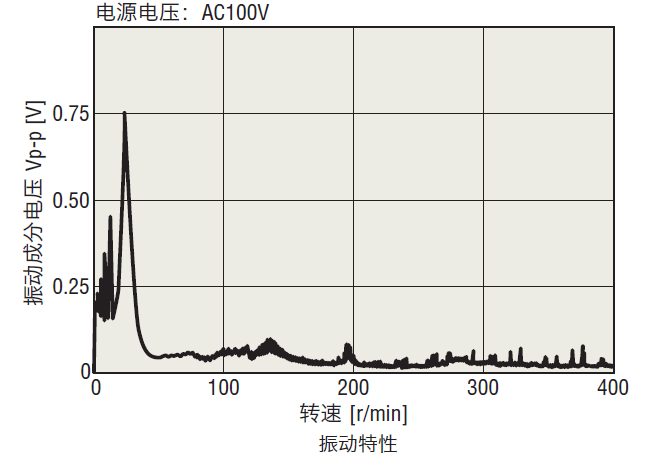
●振动特性
步进电动机以连续的步距状态边移动边重复旋转。其步距状态的移动会产生如下所示的1步距响应。
①停止状态的步进电动机输入1个脉冲时,会朝下一个步距角度进行加速。
②加速后的电动机通过步距角度并过冲某个角度后,则会朝反方向被拉回。
③如此般衰减振动后,将于既定的步距角度位置上停止下来。
步进电动机以连续的步距状态边移动边重复旋转。其步距状态的移动会产生如下所示的1步距响应。
①停止状态的步进电动机输入1个脉冲时,会朝下一个步距角度进行加速。
②加速后的电动机通过步距角度并过冲某个角度后,则会朝反方向被拉回。
③如此般衰减振动后,将于既定的步距角度位置上停止下来。

产生此一衰减振动的步距状态的移动即为低速旋转时的振动原因。振动特性所表现的即是步进电动机旋转中的振动的大小的特性。振动幅度越小旋转越顺畅。
静特性
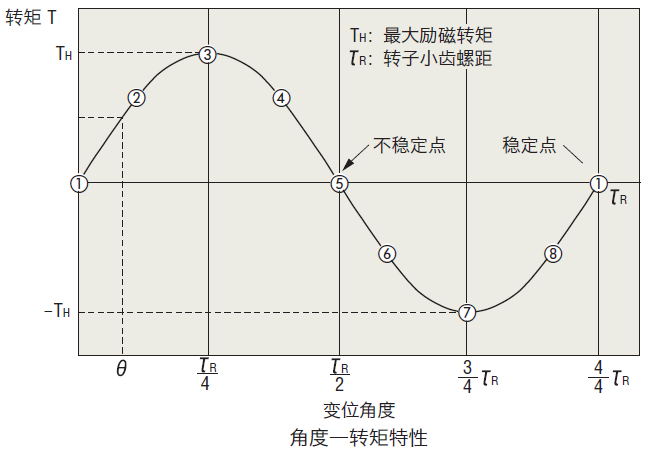
●角度―转矩特性
将电动机以额定电流励磁,并由外部朝电动机转轴施加转矩,使得转子角度产生变化,此时角度与转矩的关系称为角度―转矩特性。下图即其特性的表示。
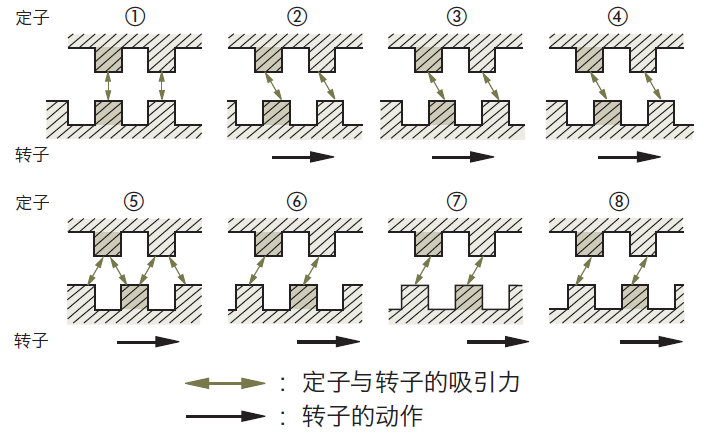
将上示特性图中各点上的定子与转子的小齿的位置关系表示为如下图。
在稳定点①平衡并停止时,向电动机转轴施加外力,则会向左产生欲将之拉回稳定点①的转矩T(+),并于与外力取得平衡的角度上停止。②
继续增加外力时,即会有一角度的发生转矩达到最大。此时所发生转矩称为最大励磁转矩TH。③
施加超过此转矩的外力时,就会通过不稳定点⑤,并产生与外力同方向的转矩T(−),而往下一个稳定点①移动后停止。
在稳定点①平衡并停止时,向电动机转轴施加外力,则会向左产生欲将之拉回稳定点①的转矩T(+),并于与外力取得平衡的角度上停止。②
继续增加外力时,即会有一角度的发生转矩达到最大。此时所发生转矩称为最大励磁转矩TH。③
施加超过此转矩的外力时,就会通过不稳定点⑤,并产生与外力同方向的转矩T(−),而往下一个稳定点①移动后停止。
稳定点:
是指定子与转子的小齿于完全相对的位置而停止的点。此点非常稳定,当外力为0时一定会于此点上停止。
不稳定点:
是指定子与转子的小齿互相错开1/2螺距的位置。此为非常不稳定的状态,施加细微外力就会使转子往左边或右边的稳定点移动。
●角度精度
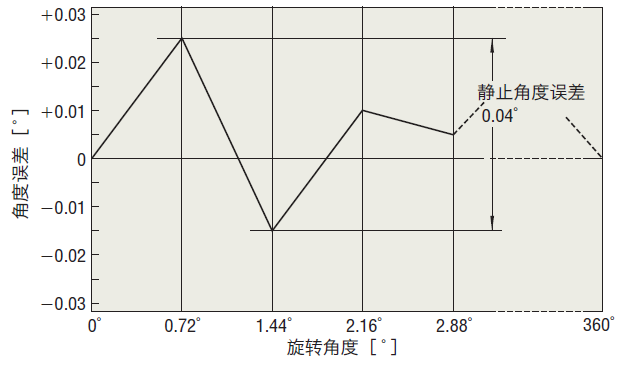
步进电动机在空载状态时,将保持±3分(0.05°)以内的角度精度。此一细微的角度误差的原因主要是来自转子与定子的机械精度以及定子线圈上细微的电阻不同所造成的。步进电动机的角度精度一般是以下列的静止角度误差来表示。
静止角度误差:
是指转子在理论上和实际上停止位置的差距。此差距所代表的是将转子的任意停止位置作为出发点,以每1步距测量360°时的(+)最大值及(−)最大值之间的宽幅。
是指定子与转子的小齿于完全相对的位置而停止的点。此点非常稳定,当外力为0时一定会于此点上停止。
不稳定点:
是指定子与转子的小齿互相错开1/2螺距的位置。此为非常不稳定的状态,施加细微外力就会使转子往左边或右边的稳定点移动。
●角度精度
步进电动机在空载状态时,将保持±3分(0.05°)以内的角度精度。此一细微的角度误差的原因主要是来自转子与定子的机械精度以及定子线圈上细微的电阻不同所造成的。步进电动机的角度精度一般是以下列的静止角度误差来表示。
静止角度误差:
是指转子在理论上和实际上停止位置的差距。此差距所代表的是将转子的任意停止位置作为出发点,以每1步距测量360°时的(+)最大值及(−)最大值之间的宽幅。
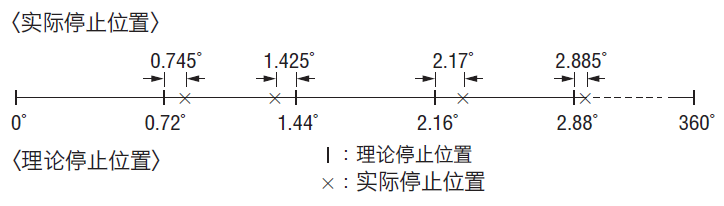
虽然静止角度误差在±3分以内,然而这是在无负载条件下的数值。但是,实际的用途上必然有摩擦负载的存在。
此时,角度精度会依据角度―转矩的特性,根据摩擦负载的不同而产生角度变位。当摩擦负载一定时,若朝同一方向运行则变位角度一定,但若从正反两方向进行运行,则往返间将产生两倍的变位角度。因此若需要停止精度时,务必只朝单一方向进行定位。
电磁制动的构造与寿命
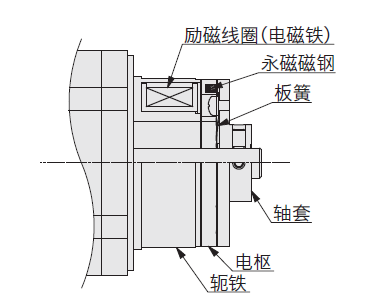
带电磁制动电动机采用无励磁动作型的定位用电磁制动。 构造例如下所示。
在励磁线圈上施加电压时,会产生与永磁磁钢的磁力反方向的起磁力,电枢受板簧的力量后被释放并使制动开放,电动机轴即可自由旋转。在未施加电压的状态下,电枢通过永磁磁钢吸着在轭铁上,电动机轴遭固定。
在励磁线圈上施加电压时,会产生与永磁磁钢的磁力反方向的起磁力,电枢受板簧的力量后被释放并使制动开放,电动机轴即可自由旋转。在未施加电压的状态下,电枢通过永磁磁钢吸着在轭铁上,电动机轴遭固定。
●工作与寿命
该制动在电动机未励磁的状态下可作为位置保持用途使用。请勿作为停止旋转中负载的制动用途使用。由于没有装备制动带用摩擦衬片,因此,如果频繁进行制动会使金属之间互相摩擦而产生磨损或烧结现象,导致无法正常工作。工作寿命是板簧疲劳寿命的100万次。由于步进电动机停止时仍有保持力,因此,只限装置的电源ON/OFF时运行电磁制动的使用方法。
按用途选择电动机
针对您对电动机的基础要求,助您挑选符合条件的产品。