








αSTEP/步进电动机
| ▶步进电动机的构造 |
▶步进电动机的工作原理 |
| ▶步进电动机的基本特性 |
▶步进电动机组合产品 |
| ▶步进电动机的驱动器 |
▶闭环步进电动机αSTEP |
| ▶利用励磁定时信号的机械原点返回运行 |
▶电缆线长度与传送频率的关系 |
| ▶联轴器刚性对装置的影响 |
|
|
|
闭环步进电动机αSTEP |
控制方式的概要
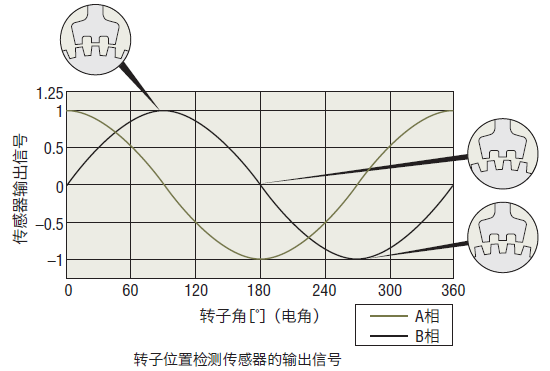
◇ 内藏转子位置检测传感器在电动机的反输出轴侧藏有转子位置检测传感器。
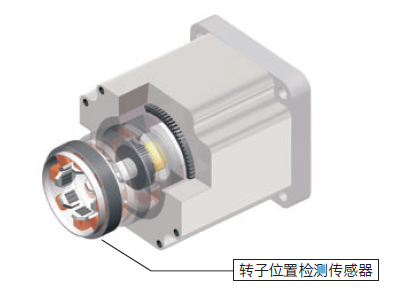
利用传感器线圈检测由于转子旋转位置所决定的磁阻的变化。
◇ 采用本公司的闭环控制系统
通过偏差计数器的计算可得知脉冲序列信号的指令位置与实际的转子旋转位置的偏差量(延迟/过转)。
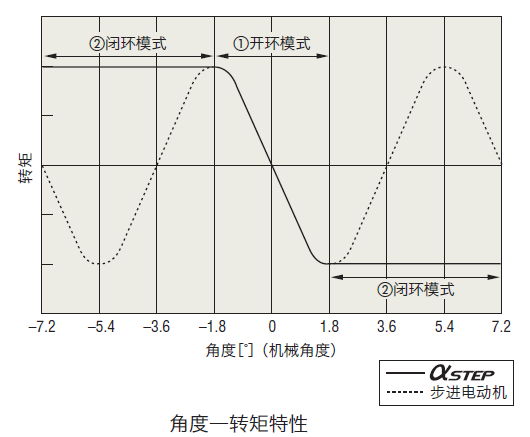
通过偏差计数器的计算结果判断是否进入“过载领域”,以转换开环模式/闭环模式来运行。
● 通常情况下,以开环模式运行。
● 过载时,以闭环模式运行。
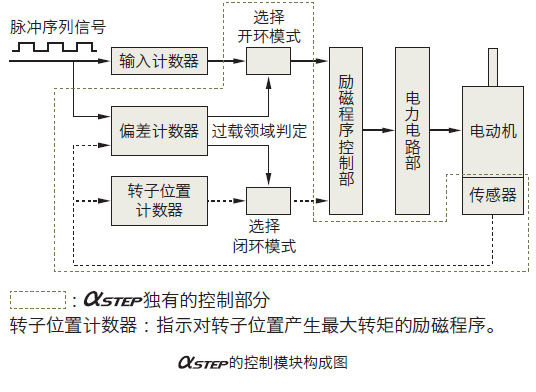
于闭环模式下,驱动器会控制电动机线圈的励磁状态,令其对于转子旋转位置产生最大转矩。采用此种控制方式,在角度―转矩特性上没有所谓的不稳定点(过载领域)。
通过偏差计数器的计算可得知脉冲序列信号的指令位置与实际的转子旋转位置的偏差量(延迟/过转)。
通过偏差计数器的计算结果判断是否进入“过载领域”,以转换开环模式/闭环模式来运行。
● 通常情况下,以开环模式运行。
● 过载时,以闭环模式运行。
于闭环模式下,驱动器会控制电动机线圈的励磁状态,令其对于转子旋转位置产生最大转矩。采用此种控制方式,在角度―转矩特性上没有所谓的不稳定点(过载领域)。
αSTEP的特性
◇ 提升步进电动机的性能
● 高速领域的转矩特性更容易使用
αSTEP无需如以往的步进电动机一般需要考虑以下各点。
● 限制起动脉冲频率
可灵活运用自起动领域,轻易实现高速运行。
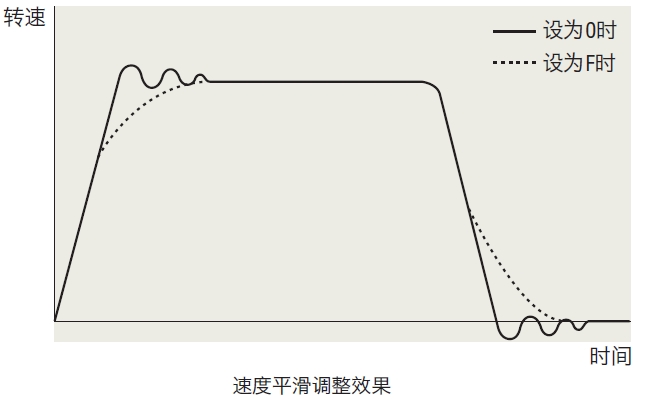
● 使用速度平滑调整调节起动时/停止时的响应性
不需变更控制器的数据(起动脉冲频率、加减速常数)即可将起动时/停止时的响应性做16阶段的调节。此一功能主要目的是希望能减少对工作物的冲击,以及降低低速运行时的振动。
● 高速领域的转矩特性更容易使用
αSTEP无需如以往的步进电动机一般需要考虑以下各点。
● 限制起动脉冲频率
可灵活运用自起动领域,轻易实现高速运行。
● 使用速度平滑调整调节起动时/停止时的响应性
不需变更控制器的数据(起动脉冲频率、加减速常数)即可将起动时/停止时的响应性做16阶段的调节。此一功能主要目的是希望能减少对工作物的冲击,以及降低低速运行时的振动。
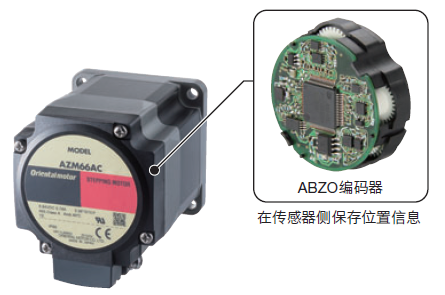
◇ 机械式多回转绝对式编码器(ABZO编码器)
ABZO编码器以机械方式检测位置,并在传感器侧保存位置。通过在传感器侧保存位置信息,可建立绝对式系统,以在电源切断时也能够保持位置信息。此外,无需像以往一样需要电池才可备份位置信息,因此,拆下电动机电缆线也不会失去位置。
ABZO编码器以机械方式检测位置,并在传感器侧保存位置。通过在传感器侧保存位置信息,可建立绝对式系统,以在电源切断时也能够保持位置信息。此外,无需像以往一样需要电池才可备份位置信息,因此,拆下电动机电缆线也不会失去位置。
相关产品

|
|
|
|
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。