









解决方案一览
-
镜头检测模组的高稳定性、
高效率检测应用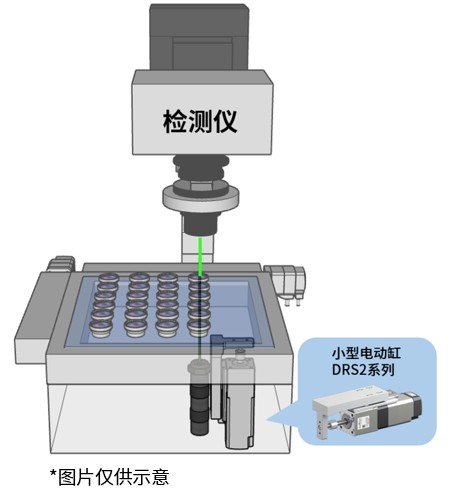
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 降低振动
- 电动传动装置
- 混合控制系统αSTEP
为您讲解镜头检测模组的高稳定性、
高效率检测应用
-
小型直线传动装置,
让紧凑空间高效运转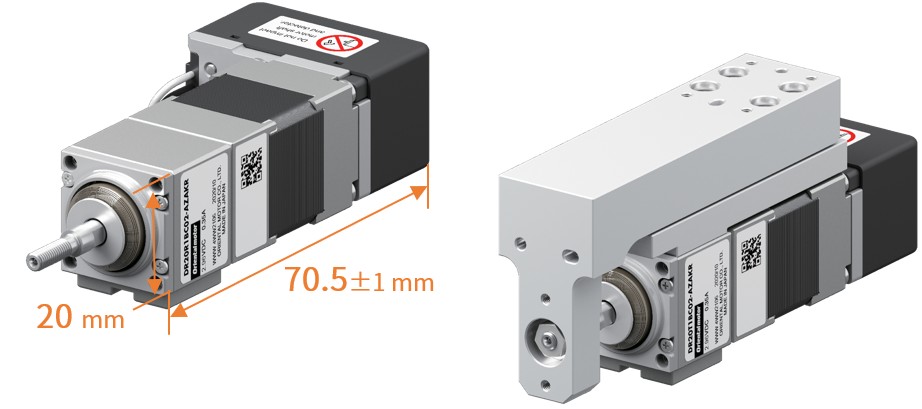
- 省空间/小型轻量化
- 提高精度
- 节省人力时间
(设计/拆装/配线) - 电动传动装置
- 混合控制系统αSTEP
为您讲解小型直线传动装置
如何让紧凑空间高效运转
-
可靠·简便的定位,
还是绝对式系统的好
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 抗干扰
- 耐环境
- 混合控制系统αSTEP
- 其他
为您介绍可靠·简便的
绝对式系统
-
自动化核心驱动
网络通讯智能互联
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 监控/协同动作
- 抗干扰
- 混合控制系统αSTEP
- 其他
为您介绍半导体核心驱动
网络通讯智能互联
-
IoT预知保全
高效产能保障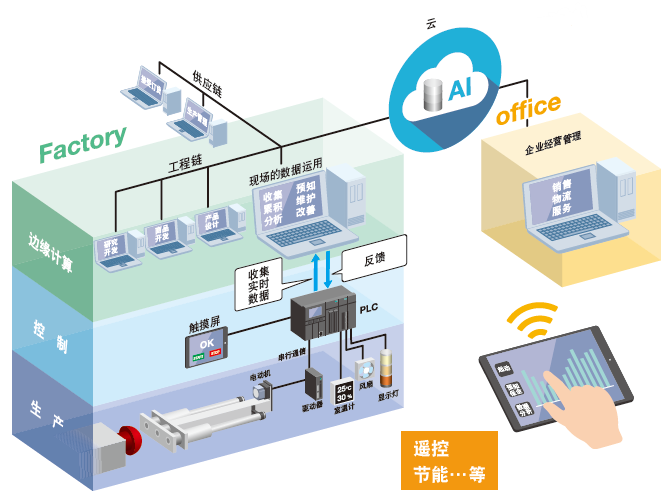
- 监控/协同动作
- IoT/预知保全/智能化
- 长寿命/品质稳定
- 混合控制系统αSTEP
- 其他
助力紧凑而高效的未来制造
-
自动光学检测设备的
扁平化设计应用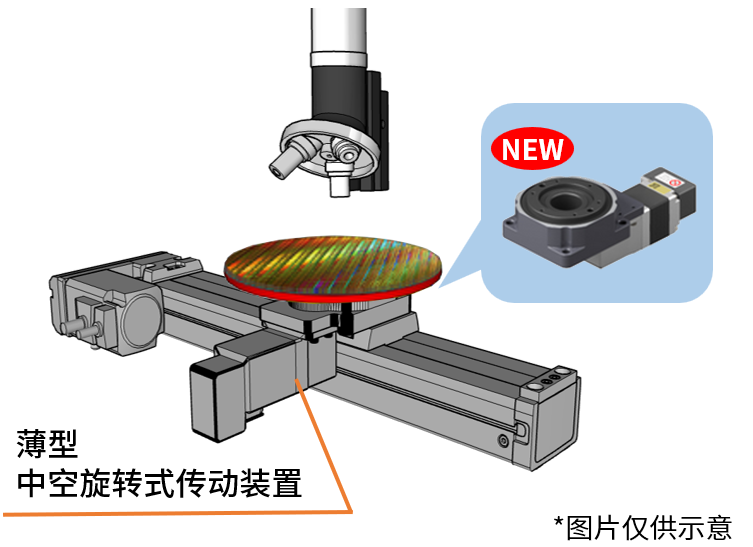
- 半导体相关
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 电动传动装置
- 混合控制系统αSTEP
为您讲自动光学检测设备的
扁平化设计应用
-
活用循环功能,
坐标管理&定位十分轻松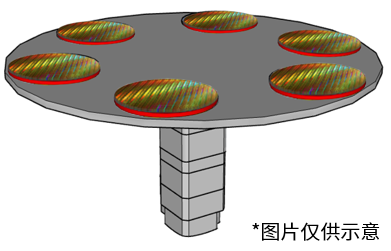
- 半导体相关
- 节省人力时间
(设计/拆装/配线) - 混合控制系统αSTEP
- 步进电动机
- 电动传动装置
为您讲解晶圆旋转主轴工位的
坐标简易管理应用
-
活用形状连接,
摆臂动作可以很顺滑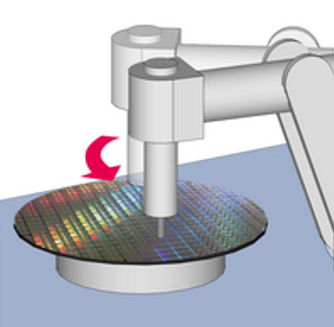
- 半导体相关
- 节省人力时间
- 监控/协同动作
- 降低振动
- IoT/预知保全/智能化
- 混合控制系统αSTEP
为您讲解摆臂工位
如何让多段定位的控制更加平稳?
-
半导体设备小型化
--紧凑而高效的未来制造解决方案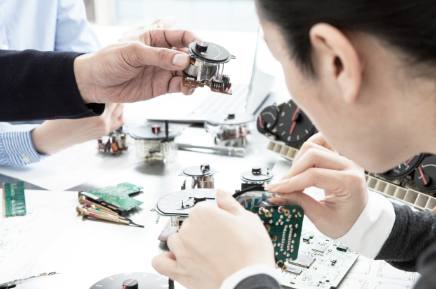
- 半导体相关
- 省空间/小型轻量化
- 步进电动机
- 混合控制系统αSTEP
- 电动传动装置
为您提供紧凑而高效的未来制造解决方案
-
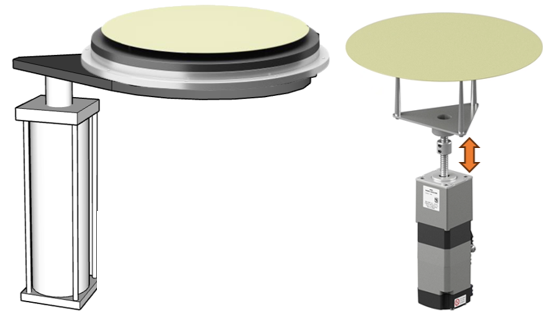
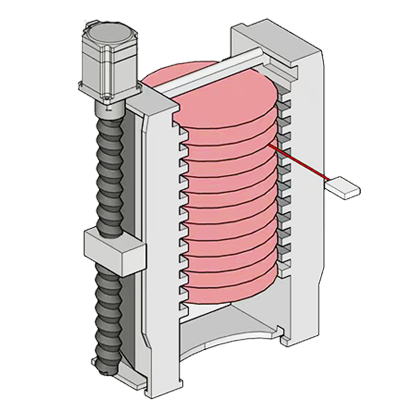
CUP升降工位的
多轴同步简易设计应用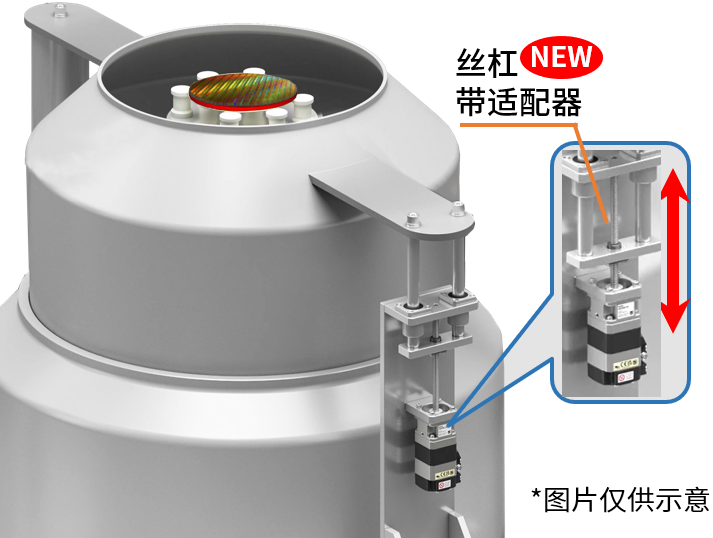
- 半导体相关
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 步进电动机
- 混合控制系统αSTEP
- 电动传动装置
为您讲解兼顾小型化、
同步性的升降CUP装置
-
优化半导体设备空间利用率
解决方案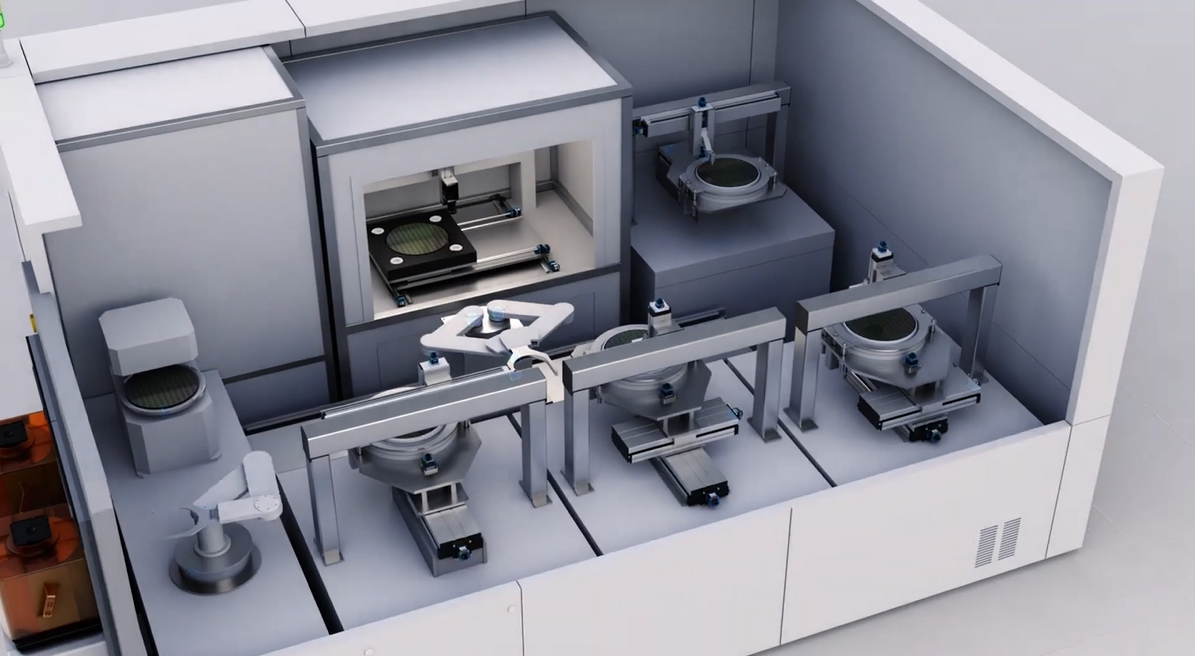
- 半导体相关
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 混合控制系统αSTEP
- 步进电动机
为您讲优化半导体设备
空间利用率的解决方案
-
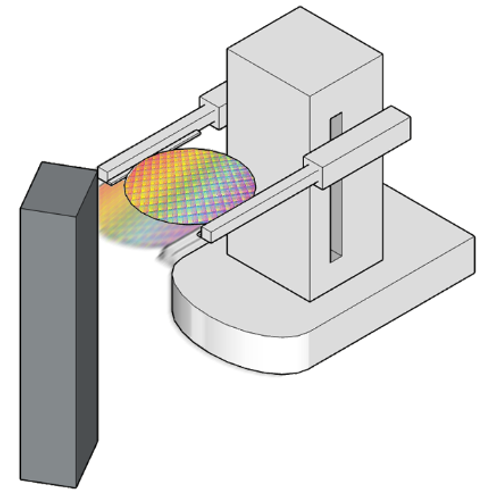
晶圆旋转主轴工位的
坐标简易管理应用
- 半导体相关
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - 驱动大负载
- 混合控制系统αSTEP
- 步进电动机
为您讲解晶圆旋转主轴工位的
坐标简易管理应用
-
化学机械抛光(CMP)
设备应用提案
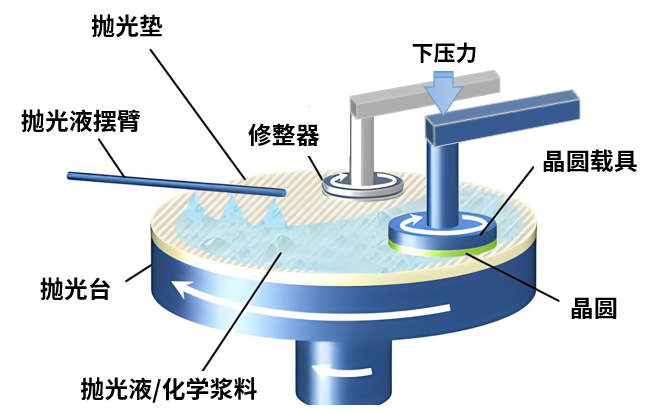
- 省空间/小型轻量化
- 驱动大负载
- 节省人力时间
- 转矩控制/转矩限制
- 半导体相关
- αSTEP/
电动传动装置
为您介绍CMP机械臂机构的课题解决方案
-
晶圆Pin针顶升机构的设计提案
- 半导体相关
- 省空间/小型轻量化
- 提高精度
- 节省人力时间
(设计/拆装/配线) - αSTEP
- 电动传动装置
为您介绍晶圆Pin针顶升机构的设计提案
- 半导体相关
-
机械臂机构应用提案

- 省空间/小型轻量化
- 驱动大负载
- 节省人力时间
- 转矩控制/转矩限制
- 半导体相关
- αSTEP/无刷电动机
/电动传动装置
为您提供机械臂机构提案。
-
流水线综合解决方案
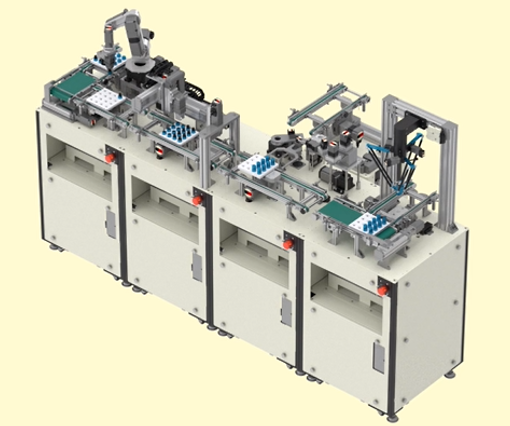
- 省空间/小型轻量化
- 驱动大负载
- 提高精度
- 速度稳定
- αSTEP
- 电动传动装置
- 无刷电动机
为您演示流水线综合解决方案
-
晶圆单片清洗设备应用提案

- 半导体相关
- 省空间/小型轻量化
- 提高精度
- 节省人力时间
(设计/拆装/配线) - αSTEP
- 电动传动装置
该设备在晶圆上、下料、CUP升降装置、
喷淋/清洗装置等机构应用上,
东方马达均提供强有力的解决方案。
- 半导体相关
-
步进电动机助力
晶棒缓慢生长的应用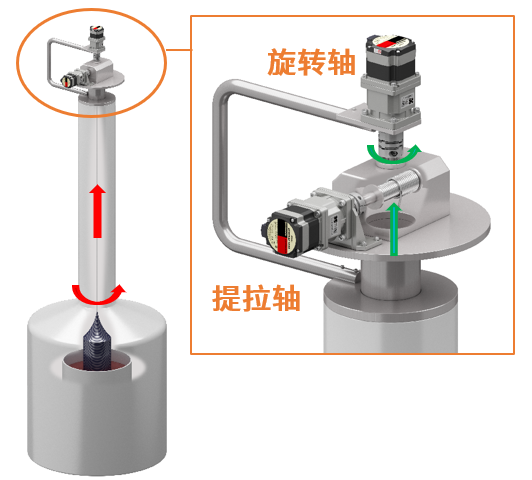
- 半导体相关
- 省空间/小型轻量化
- 提高精度
- 驱动大负载
- 监控/协同动作
- 步进电动机/αSTEP
晶棒生长设备:稳定低速的对晶棒进行提拉和旋转
-
晶圆传送盒设备:晶圆放置状态的辅助判断
- 半导体相关
- 监控/协同动作
- IoT/预知保全/
智能化 - 步进电动机
- αSTEP
步进电动机EtherCAT 探针功能(Touch probe)的检测应用
-
如何短时间完成调试、提高产能?
- 监控/协同动作
- 步进电动机
- αSTEP
时间紧、任务重,
如何短时间完成调试、提高产能?
-
机械手设备
---步进电动机的同步性和高响应性的应用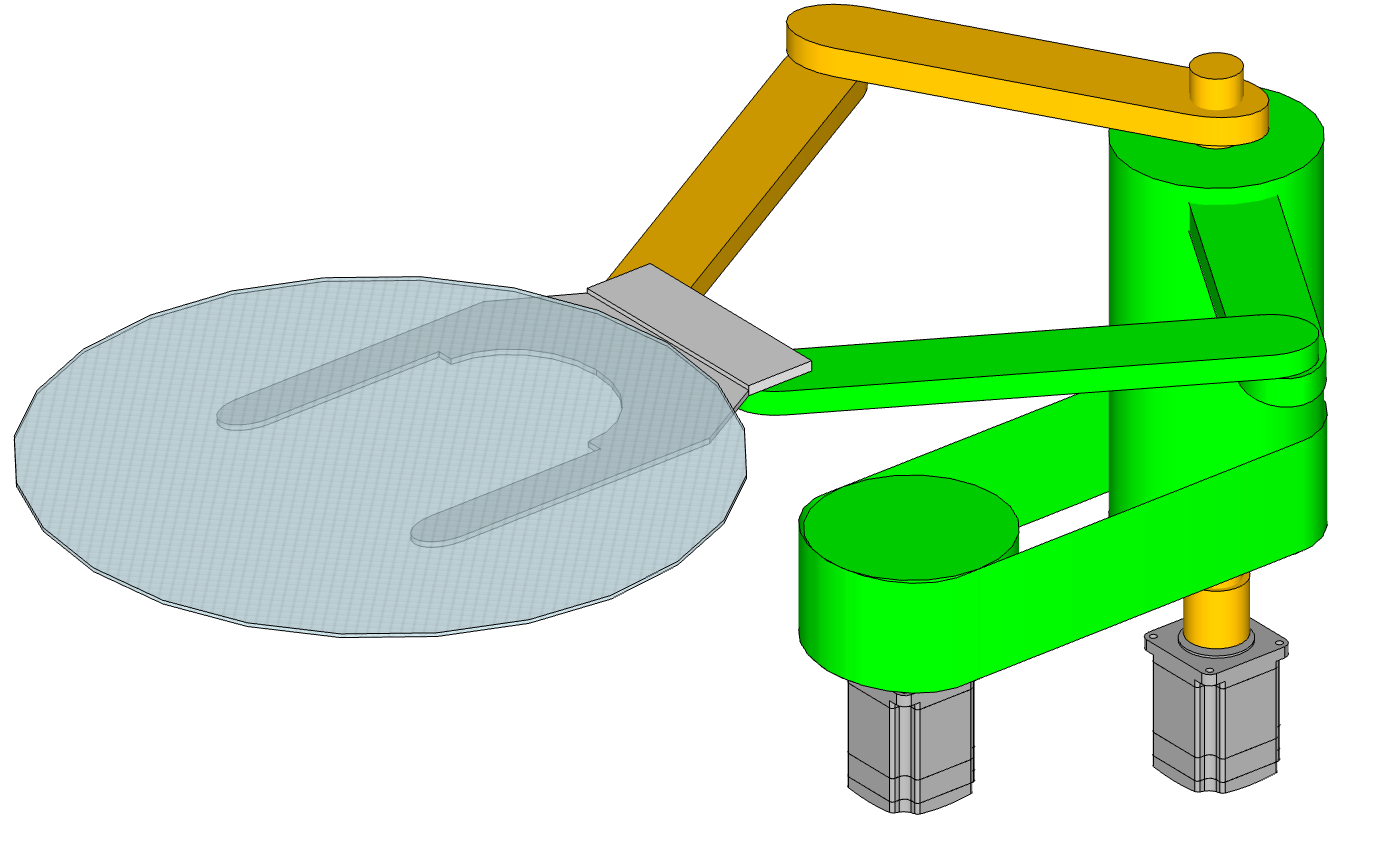
- 半导体相关
- 监控/协同动作
- 提高精度
- 步进电动机
- αSTEP
机械手设备:稳定的对物料进行取、放
-
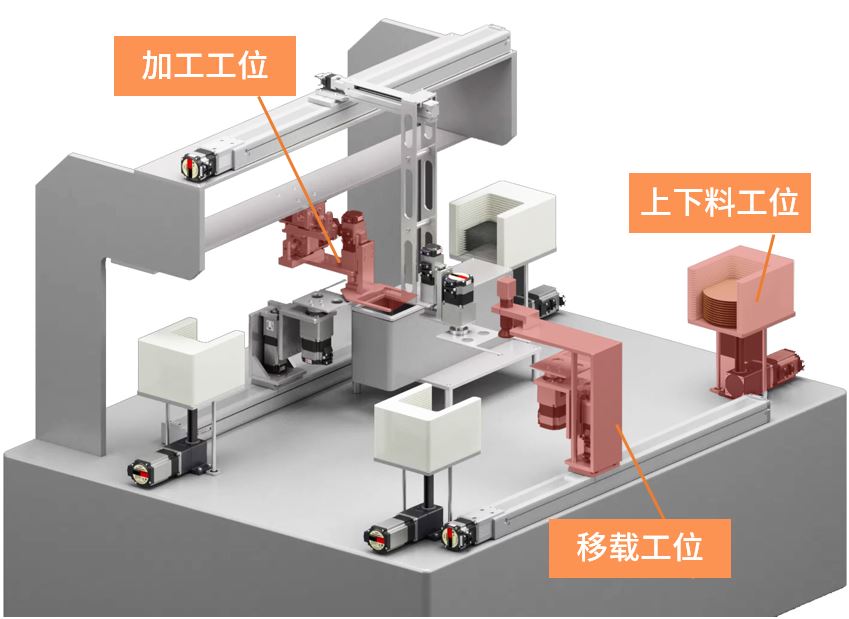
多工位移载加工设备
- 半导体相关
- 省空间/小型轻量化
- 提高精度
- 节省人力时间
(设计/拆装/配线) - αSTEP
- 电动传动装置
以半导体常见的多工位设备为例,
介绍上下料工位、移载工位、
加工工位中使用东方马达产品的解决方案。
- 半导体相关
-
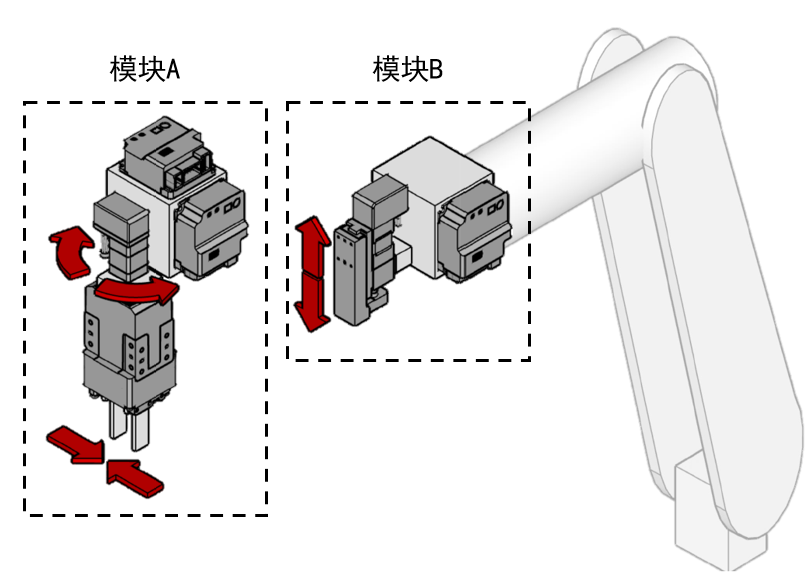
自制机器人,可以很简单

- 节省人力时间(设计/拆装/配线)
- 降低整体部件成本
- 省空间/小型轻量化
- αSTEP
- 其他
为您提供基于“机器人自制化”及
“减轻设计负担”的课题解决方案
-
真机实例集:
SCARA机器人(水平多关节机器人)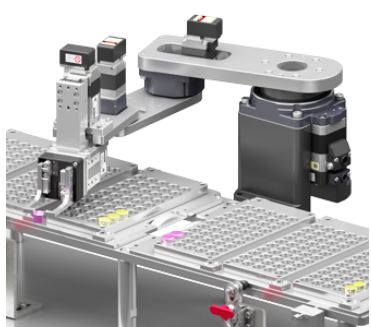
- 节省人力时间(设计/拆装/配线)
- 降低整体部件成本
- 省空间/小型轻量化
- αSTEP
- 其他
SCARA机器人(水平多关节机器人)
-
多用途设备如何实现快速搭建?
- 半导体相关
- 节省人力时间
(设计/拆装/配线) - 省空间/小型轻量化
- αSTEP
- 电动传动装置
单机种实现功能多样化,
通过随时更换标准化机构部件,
从而实现多用途设备的快速搭建。
- 半导体相关
-
闸门机构如何兼顾安全性与小型化
- 省空间/小型轻量化
- 安全功能/STO
- 驱动大负载
- αSTEP
为您讲解闸门机构如何兼顾安全性与小型化
-
使自动化更自由
-----开拓移动自动化未来的新概念提案
- 省空间/小型轻量化
- 监控/协同动作
- 无刷电动机
- αSTEP
自由布局、提高生产效率、多品种少量生产、
节省空间、节能 ......
东方马达开拓移动自动化未来的新概念提案。
-
使用形状连接功能减轻上位负担
- 节省人力时间
(设计/拆装/配线) - 安全功能/STO
- αSTEP
为您讲解如何使用形状连接功能减轻上位负担
- 节省人力时间
-
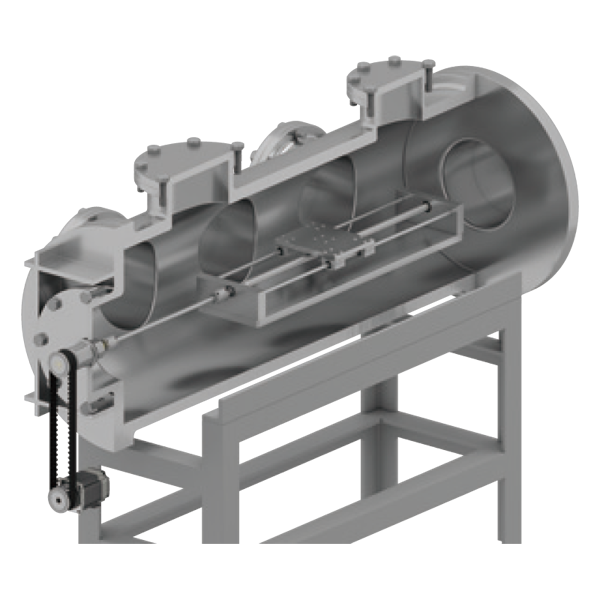
真空设备如何实现小型化
- 半导体相关
- 省空间/小型轻量化
- 监控/协同动作
- 步进电动机
- αSTEP
为您讲解真空设备如何实现小型化
-
复合型搬运机器人如何保证工件安全?
- 半导体相关
- 监控/协同动作
- 安全功能/STO
- αSTEP
为您讲解复合型搬运机器人如何保证工件安全
-
真机实例集:
螺丝旋紧装置
- 省空间/小型轻量化
- 转矩控制/转矩限制
- 监控/协同动作
- αSTEP
- 电动传动装置
通过真机实例为您讲解螺丝旋紧装置及电动机的选用
-
真机实例集:工件处理装置
(直交机器人·升降旋转单元)
- 驱动大负载
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - αSTEP
- 电动传动装置
通过真机实例为您讲解工件处理装置及电动机的选用
-
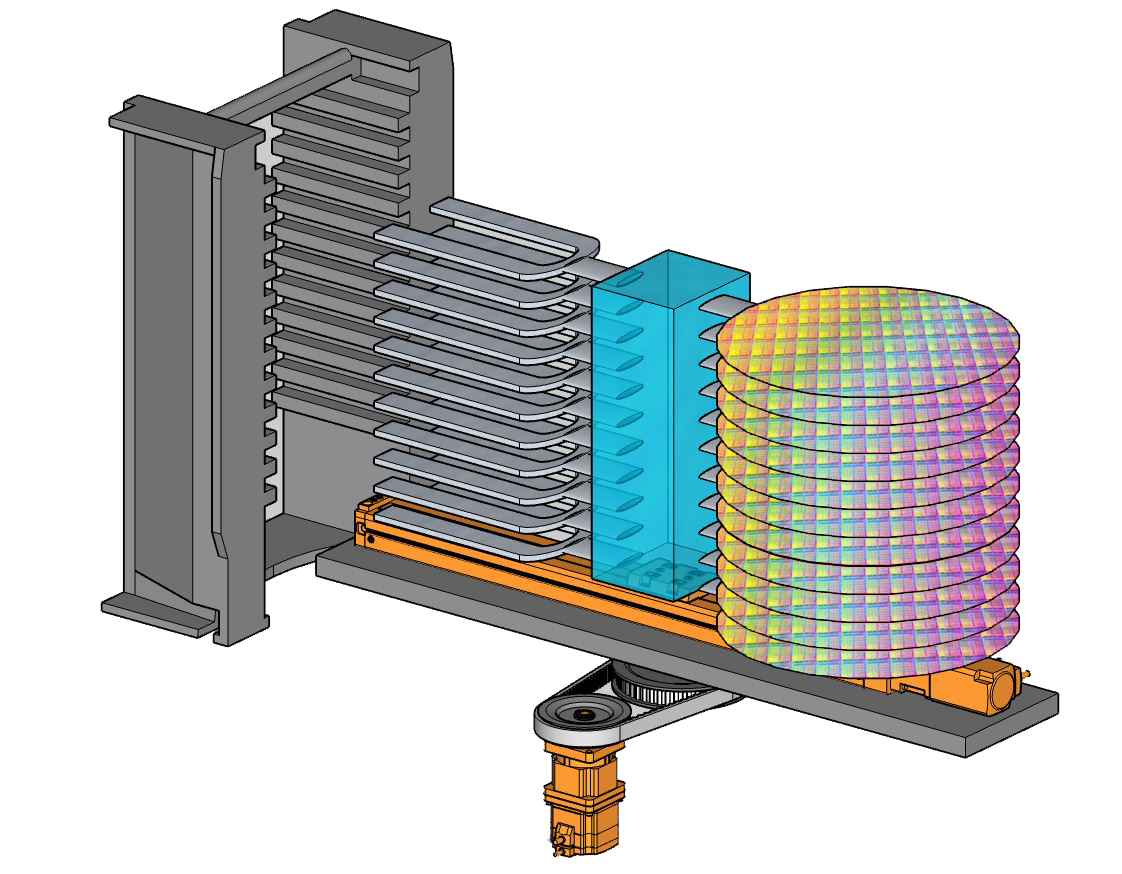
如何提升批量晶圆输送效率和质量?
- 半导体相关
- 省空间/小型轻量化
- 驱动大负载
- αSTEP
为您讲解如何提升批量晶圆输送效率和质量
-
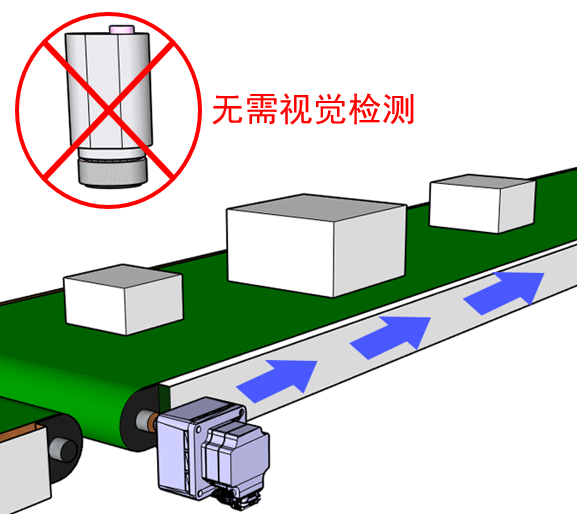
无需视觉检测,判别工件合格与否
- 监控/协同动作
- 转矩控制/转矩限制
- 降低整体部件成本
- αSTEP
为您讲解无需视觉检测,如何判别工件合格与否
-
真机实例集:
多品种零件供料装置
- 半导体相关
- 驱动大负载
- 监控/协同动作
- 节省人力时间
(设计/拆装/配线) - αSTEP
- 电动传动装置
通过真机实例为您讲解多品种零件供料装置
及电动机的选用
-
真机实例集:
工件搬运装置
- 省空间/小型轻量化
- 驱动大负载
- 高速高转矩
- αSTEP
- 电动传动装置
通过真机实例为您讲解工件搬送装置及电动机的选用
-
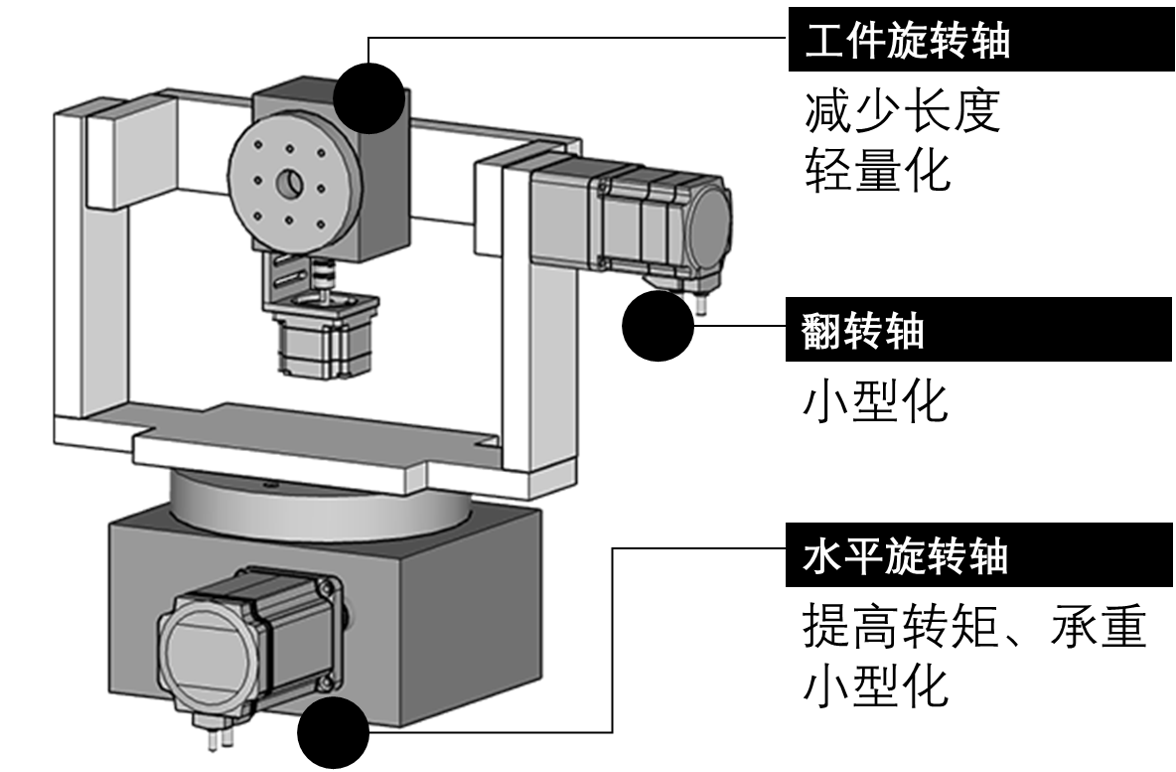
三轴转台的优化方案
- 半导体相关
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - αSTEP
- 步进电动机
- 电动传动装置
为您介绍三轴转台的优化方案。
-
如何缩短通讯时长,提高生产效率?
- 监控/协同动作
- 混合控制系统αSTEP
为您介绍影响通讯周期时长的因素以及如何有效缩短通讯周期。
-
如何实现设备小型化,提高厂房容纳度?
- 省空间/小型轻量化
- 步进电动机
- 混合控制系统αSTEP
为您讲解如何实现设备小型化,提高厂房容纳度。
-
如何保证湿制程的产品质量?
- 半导体相关
- 速度稳定
- 提高精度
- 混合控制系统αSTEP
- 电动传动装置
如何保证湿制程的产品质量?
-
晶圆片检测设备--如何缩短半导体晶圆片的检测时间?
- 半导体相关
- 降低振动
- 高速高转矩
- 降低整体部件成本
- 节省人力时间
(设计/拆装/配线) - 混合控制系统αSTEP
为您讲解如何缩短半导体晶圆片的检测时间
-
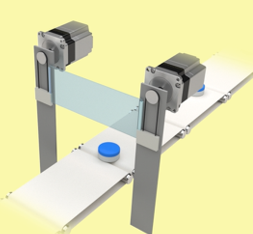
夹取--无需视觉检测系统,
也能轻松判定移动工件的大小?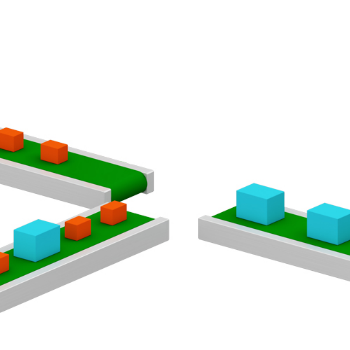
- 降低整体部件成本
- 节省人力时间
(设计/拆装/配线) - 混合控制系统αSTEP
- 电动传动装置
使用CCD视觉检测系统或者测定器的成本太高,
希望能够尽量降低成本。
-
摆臂机构--如何提高半导体设备中
摆臂机构性能,实现准确滴胶?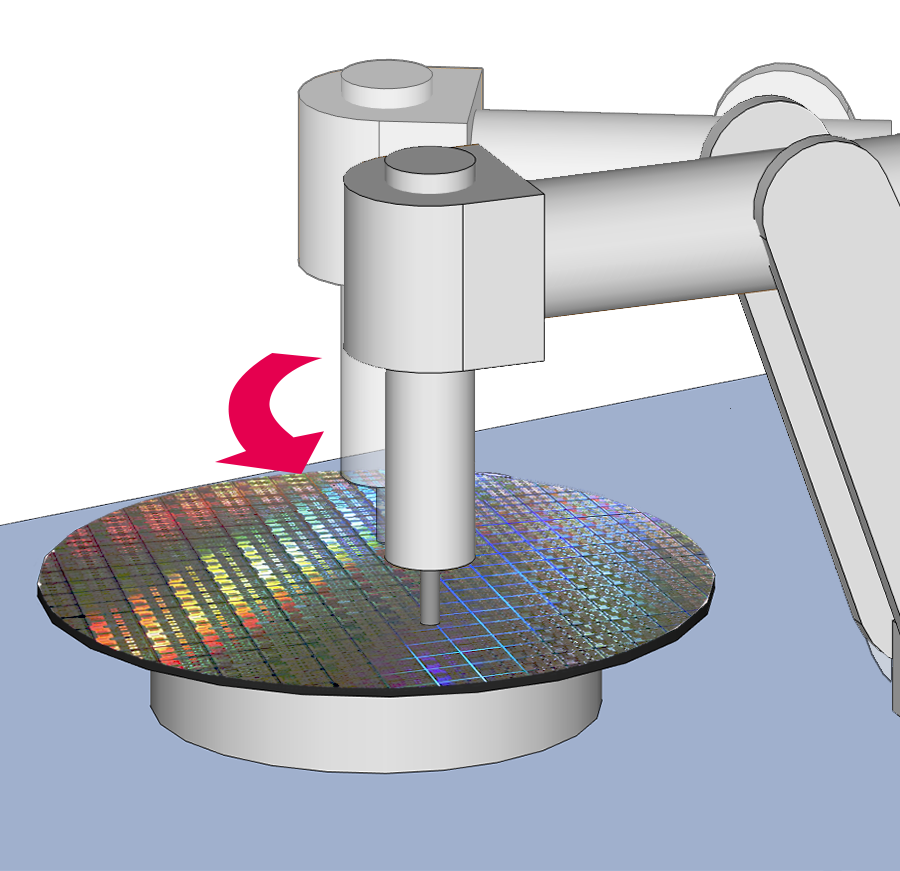
- 半导体相关
- 提高精度
- 驱动大负载
- 高速高转矩
- 降低振动
- 混合控制系统αSTEP
- 电动传动装置
为您讲解如何提高半导体设备中摆臂机构性能,
实现准确滴胶?
-
机器人--透过机器人,
领略αSTEPAZ系列的魅力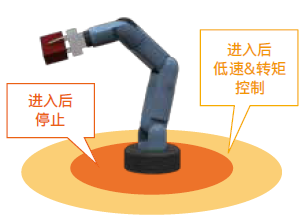
- 提高精度
- 省空间/小型轻量化
- 节省人力时间
(设计/拆装/配线) - IoT/预知保全/智能化
- 监控/协同动作
- 混合控制系统αSTEP
AZ系列强大的功能可满足自动化装置
不断提升的需求。
-
什么是“预知保全”“IoT”?
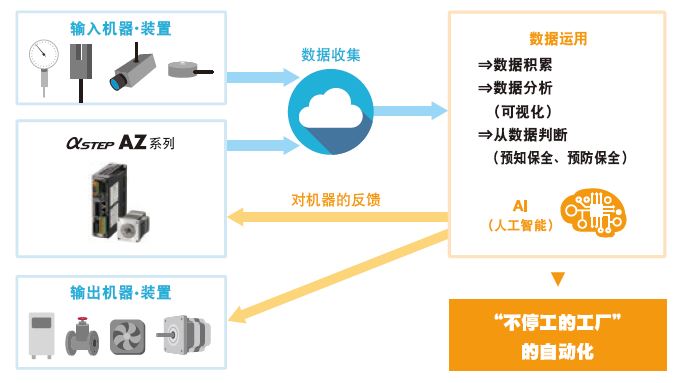
- IoT/预知保全
/智能化 - 监控/协同动作
- 混合控制系统αSTEP
- 无刷电动机
为您讲解什么是“预知保全”“IoT”?
- IoT/预知保全
-
升降装置--希望增加搬送质量

- 驱动大负载
- 省空间/小型轻量化
- 混合控制系统αSTEP
- 电动传动装置
为您讲解如何增加升降装置的搬送质量
-
夹取--适用于电动夹爪,
功能强大的αSTEPAZ系列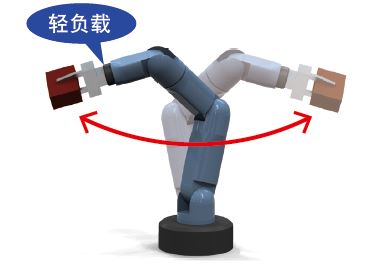
- 省空间/小型轻量化
- 转矩控制/转矩限制
- 混合控制系统αSTEP
- 电动传动装置
小型・轻量、丰富的监控功能、适合装置的控制方式、
抓持力调整・抓持确认及简易程序功能
-
耐久测试装置--耐久测试设备的系统如何简化?
- 降低整体部件成本
- 节省人力时间
(设计/拆装/配线) - 混合控制系统αSTEP
- 电动传动装置
为您讲解如何简化耐久测试设备
-
点胶机装置--降低电动机温度
- 半导体相关
- 减少发热/节能
- 提高精度
- 混合控制系统αSTEP
- 电动传动装置
电动机发出的热量传递到工作物,
使得液体的粘性或性质发生变化,影响品质安全
如何降低点胶机装置电动机温度?
-
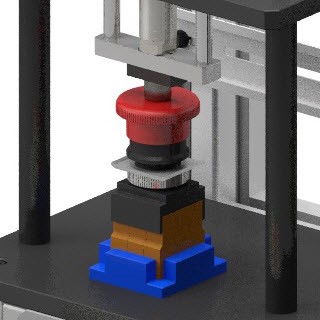
拧螺丝机--如何提高拧螺丝机的效率,
并保证工件不受到损害?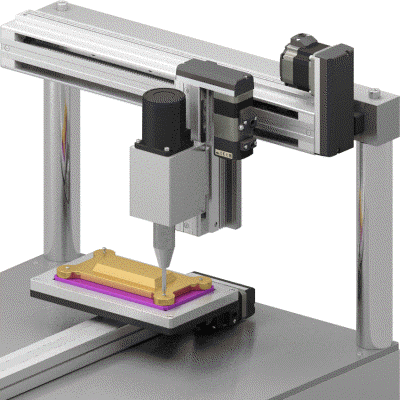
- 节省人力时间
(设计/拆装/配线) - 转矩控制/转矩限制
- 混合控制系统αSTEP
- 电动传动装置
如何通过选用合适的电动机轻松解决:
电动机的转矩过大,导致拧得过紧使螺丝或工件受损;
人工确认螺丝是否拧紧费时、易出错且效率低
的两大难题
- 节省人力时间
-
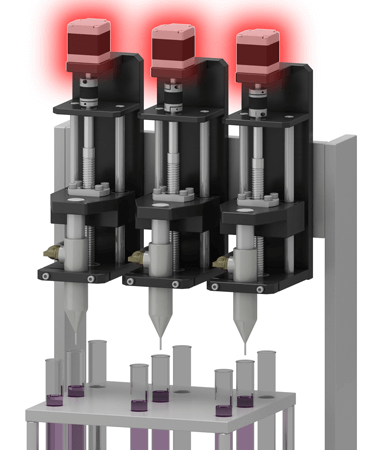
点胶机装置--点胶机装置如何小型化
- 半导体相关
- 省空间/小型轻量化
- 降低整体部件成本
- 节省人力时间
(设计/拆装/配线) - 电动传动装置
- 混合控制系统αSTEP
自行设计制造的点胶机因涂布喷嘴安装空间有限
无法收纳,因此需进一步简化设备,
使其小型化,解决空间不足的问题。